System 1.x: Learning to Balance Fast and Slow Planning with Language Models
{kind=link}
Abstract
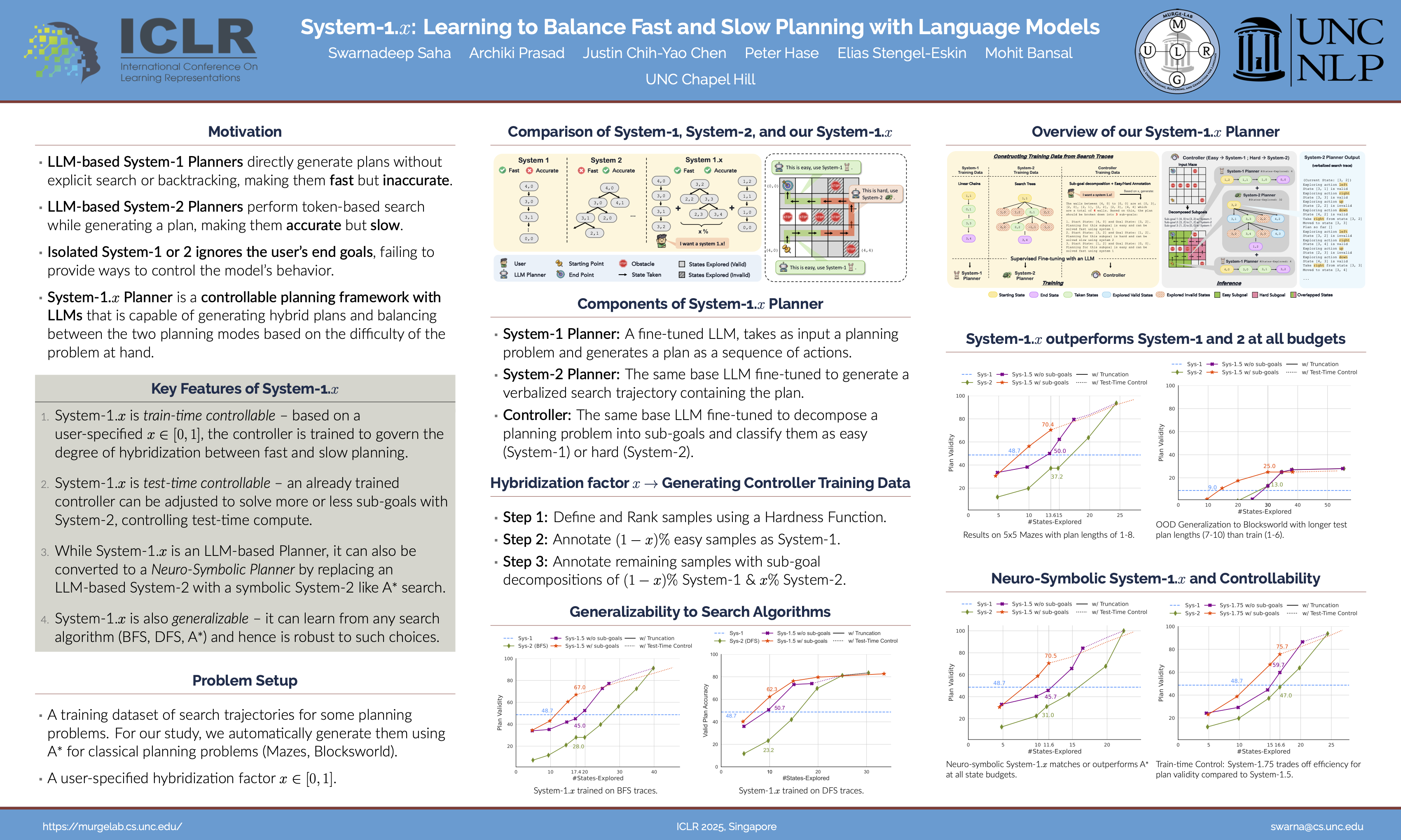
Language models can be used to solve long-horizon planning problems in two distinct modes. In a fast 'System-1' mode, models directly generate plans without any explicit search or backtracking, and in a slow 'System-2' mode, they plan step-by-step by explicitly searching over possible actions. System-2 planning, while typically more effective, is also computationally more expensive and often infeasible for long plans or large action spaces. Moreover, isolated System-1 or System-2 planning ignores the user's end goals and constraints (e.g., token budget), failing to provide ways for the user to control the model's behavior. To this end, we propose the System-1.x Planner, a framework for controllable planning with language models that is capable of generating hybrid plans and balancing between the two planning modes based on the difficulty of the problem at hand. System-1.x consists of (i) a controller, (ii) a System-1 Planner, and (iii) a System-2 Planner. Based on a user-specified hybridization factor x governing the degree to which the system uses System-1 vs. System-2, the controller decomposes a planning problem into subgoals, and classifies them as easy or hard to be solved by either System-1 or System-2, respectively. We fine-tune all three components on top of a single base LLM, requiring only search traces as supervision. Experiments with two diverse planning tasks -- Maze Navigation and Blocksworld -- show that our System-1.x Planner outperforms a System-1 Planner, a System-2 Planner trained to approximate A* search, and also a symbolic planner (A* search), given a state exploration budget. We also demonstrate the following key properties of our planner: (1) controllability: by adjusting the hybridization factor x (e.g., System-1.75 vs. System-1.5) we can perform more (or less) search, improving performance, (2) flexibility: by building a neuro-symbolic variant composed of a neural System-1 planner and a symbolic System-2 planner, we can take advantage of existing symbolic methods, and (3) generalizability: by learning from different search algorithms (BFS, DFS, A*), we show that our method is robust to the choice of search algorithm used for training.