SplineGS: Learning Smooth Trajectories in Gaussian Splatting for Dynamic Scene Reconstruction
{kind=link}
Abstract
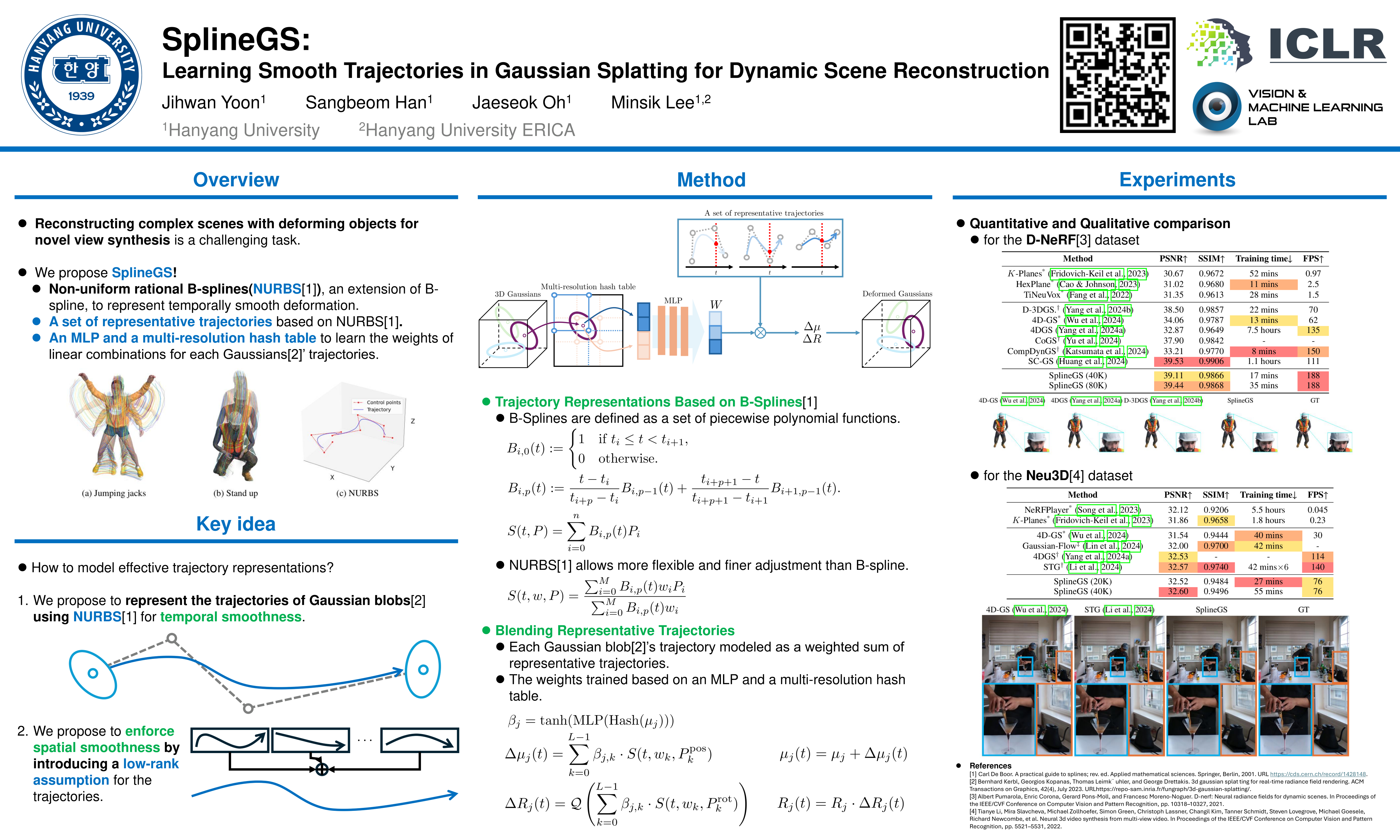
Reconstructing complex scenes with deforming objects for novel view synthesis is a challenging task. Recent works have addressed this with 3D Gaussian Splatting, which effectively reconstructs static scenes with high quality in short training time, by adding specialized modules for the deformations of Gaussian blobs. However, designing an effective deformation module that incorporates appropriate spatiotemporal inductive biases still remains unresolved. To address this issue, we propose SplineGS in this paper, which utilizes non-uniform rational B-splines (NURBS), an extension of B-spline, to represent temporally smooth deformation. A set of representative trajectories are learned based on NURBS, and the individual trajectories of Gaussian blobs are represented as linear combinations of these trajectories for spatial smoothness. The weights of the combinations are trained based on a multi-resolution hash table and an MLP, with the positions of the Gaussian blobs as the keys. Thanks to this design, the proposed method does not need any regularizers for trajectories, which enables efficient training. Experiments demonstrate that the proposed method provides competitive performance over the existing methods with much shorter training time.