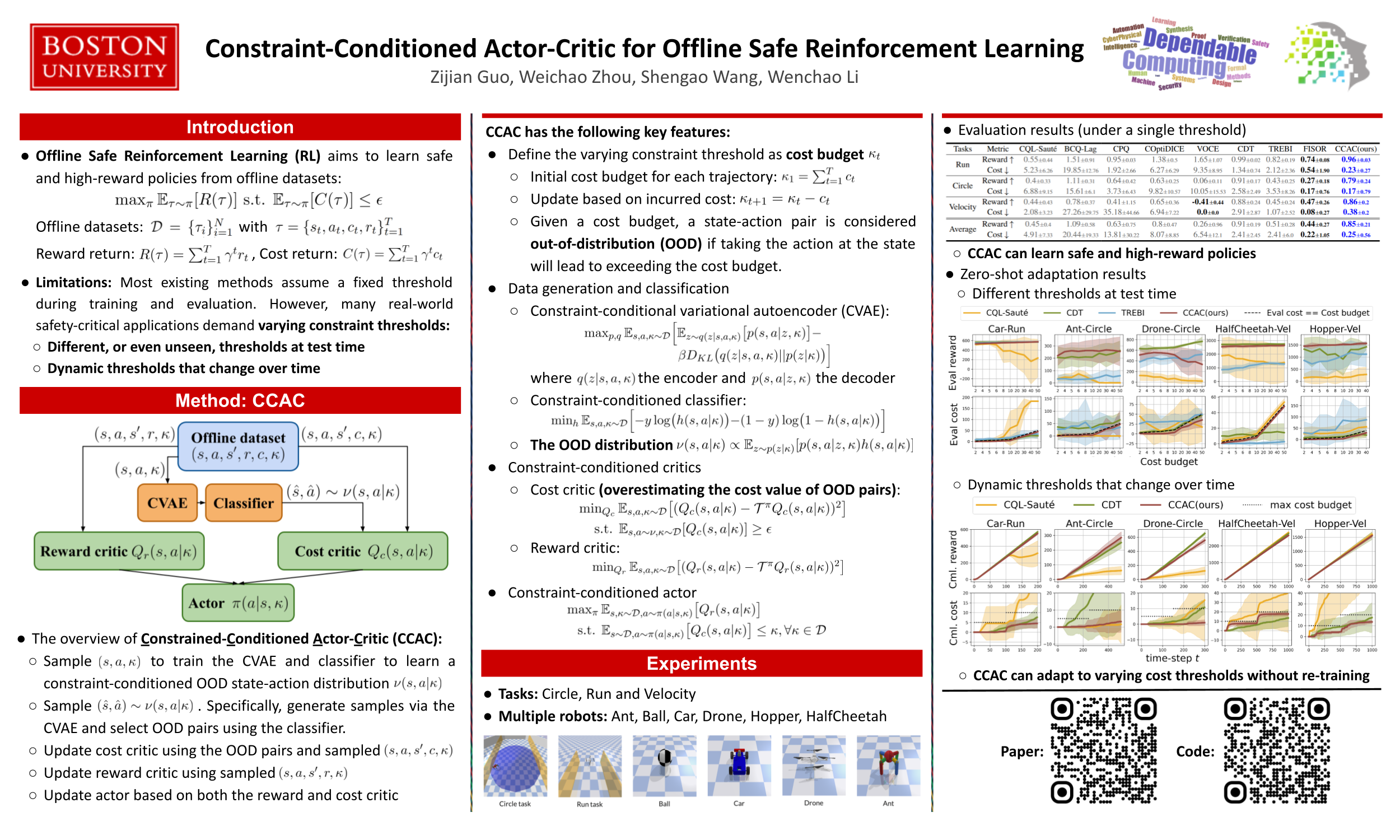
Constraint-Conditioned Actor-Critic for Offline Safe Reinforcement Learning
Zijian Guo ⋅ Weichao Zhou ⋅ Shengao Wang ⋅ Wenchao Li
2025 Poster
{kind=link}
Abstract
Offline safe reinforcement learning (OSRL) aims to learn policies with high rewards while satisfying safety constraints solely from data collected offline. However, the learned policies often struggle to handle states and actions that are not present or out-of-distribution (OOD) from the offline dataset, which can result in violation of the safety constraints or overly conservative behaviors during their online deployment. Moreover, many existing methods are unable to learn policies that can adapt to varying constraint thresholds. To address these challenges, we propose constraint-conditioned actor-critic (CCAC), a novel OSRL method that models the relationship between state-action distributions and safety constraints, and leverages this relationship to regularize critics and policy learning. CCAC learns policies that can effectively handle OOD data and adapt to varying constraint thresholds. Empirical evaluations on the $\texttt{DSRL}$ benchmarks show that CCAC significantly outperforms existing methods for learning adaptive, safe, and high-reward policies.
Video
Chat is not available.
Successful Page Load