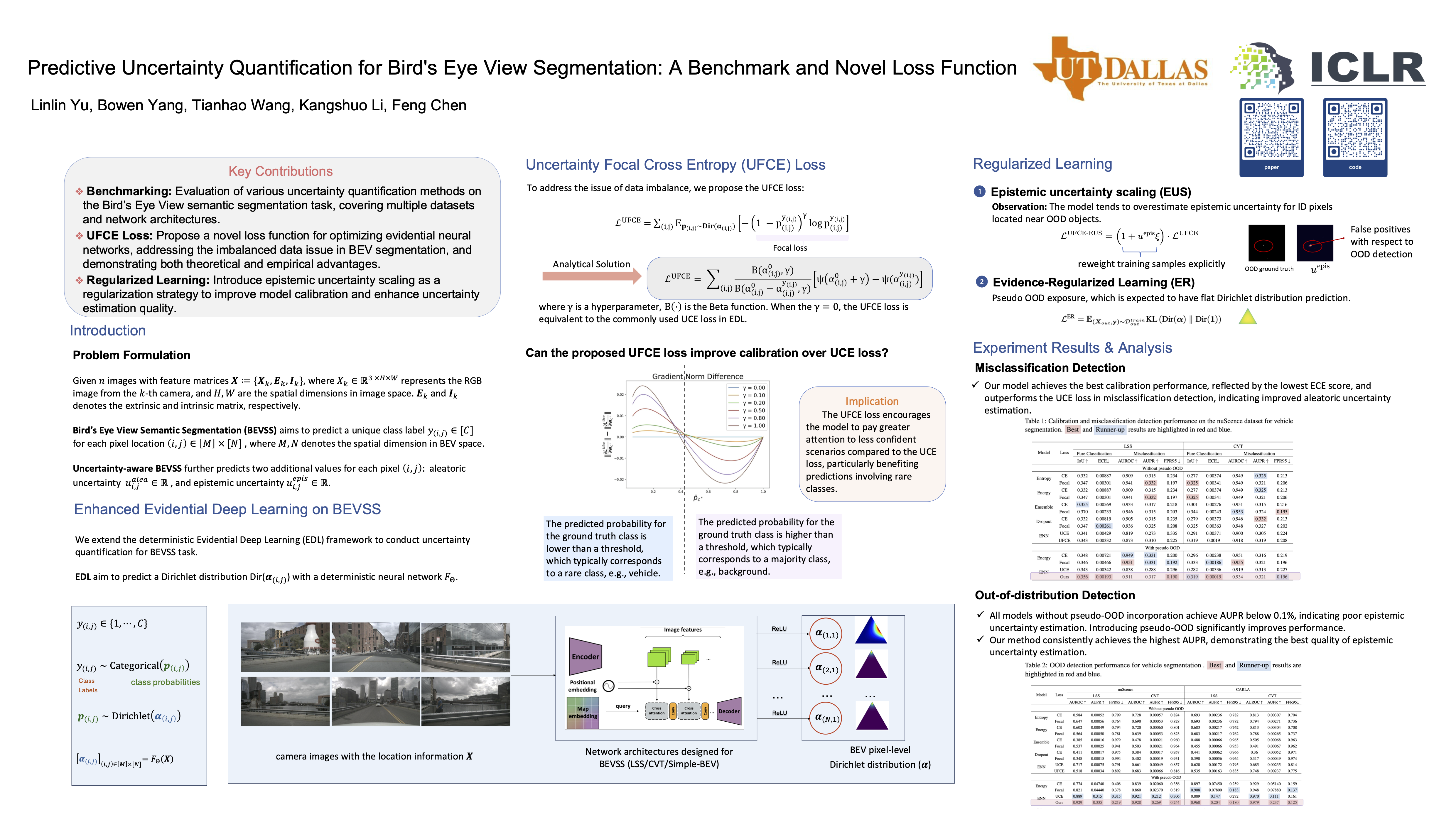
Predictive Uncertainty Quantification for Bird's Eye View Segmentation: A Benchmark and Novel Loss Function
{kind=link}
Abstract
The fusion of raw sensor data to create a Bird's Eye View (BEV) representation is critical for autonomous vehicle planning and control. Despite the growing interest in using deep learning models for BEV semantic segmentation, anticipating segmentation errors and enhancing the explainability of these models remain underexplored. This paper introduces a comprehensive benchmark for predictive uncertainty quantification in BEV segmentation, evaluating multiple uncertainty quantification methods across three popular datasets with three representative network architectures. Our study focuses on the effectiveness of quantified uncertainty in detecting misclassified and out-of-distribution (OOD) pixels while also improving model calibration. Through empirical analysis, we uncover challenges in existing uncertainty quantification methods and demonstrate the potential of evidential deep learning techniques, which capture both aleatoric and epistemic uncertainty. To address these challenges, we propose a novel loss function, Uncertainty-Focal-Cross-Entropy (UFCE), specifically designed for highly imbalanced data, along with a simple uncertainty-scaling regularization term that improves both uncertainty quantification and model calibration for BEV segmentation.