M^3PC: Test-time Model Predictive Control using Pretrained Masked Trajectory Model
{kind=link}
Abstract
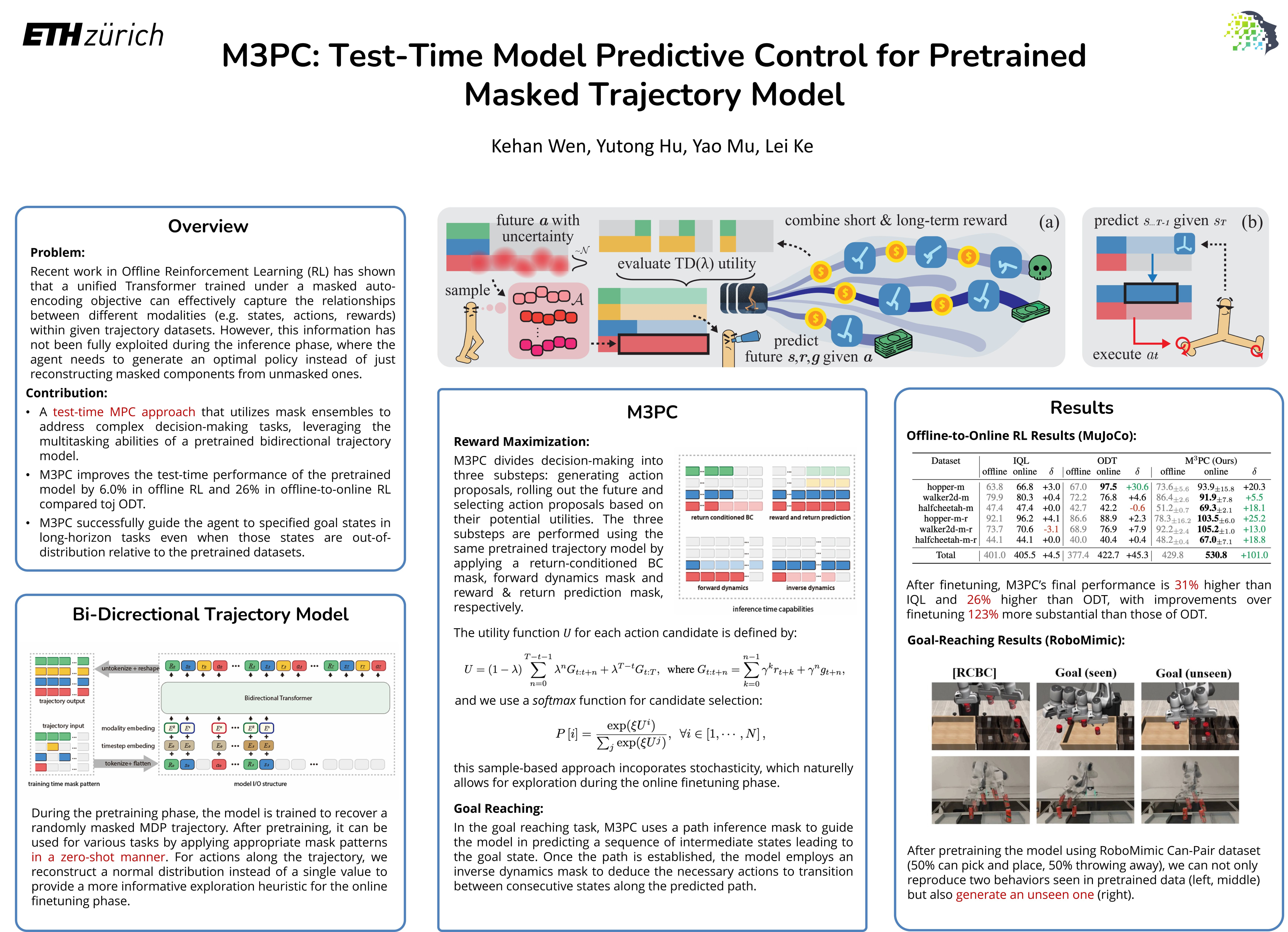
Recent work in Offline Reinforcement Learning (RL) has shown that a unified transformer trained under a masked auto-encoding objective can effectively capture the relationships between different modalities (e.g., states, actions, rewards) within given trajectory datasets. However, this information has not been fully exploited during the inference phase, where the agent needs to generate an optimal policy instead of just reconstructing masked components from unmasked. Given that a pretrained trajectory model can act as both a Policy Model and a World Model with appropriate mask patterns, we propose using Model Predictive Control (MPC) at test time to leverage the model's own predictive capacity to guide its action selection. Empirical results on D4RL and RoboMimic show that our inference-phase MPC significantly improves the decision-making performance of a pretrained trajectory model without any additional parameter training. Furthermore, our framework can be adapted to Offline to Online (O2O) RL and Goal Reaching RL, resulting in more substantial performance gains when an additional online interaction budget is given, and better generalization capabilities when different task targets are specified. Code is available: \href{https://github.com/wkh923/m3pc}{\texttt{https://github.com/wkh923/m3pc}}.