LLaRA: Supercharging Robot Learning Data for Vision-Language Policy
{kind=link}
Abstract
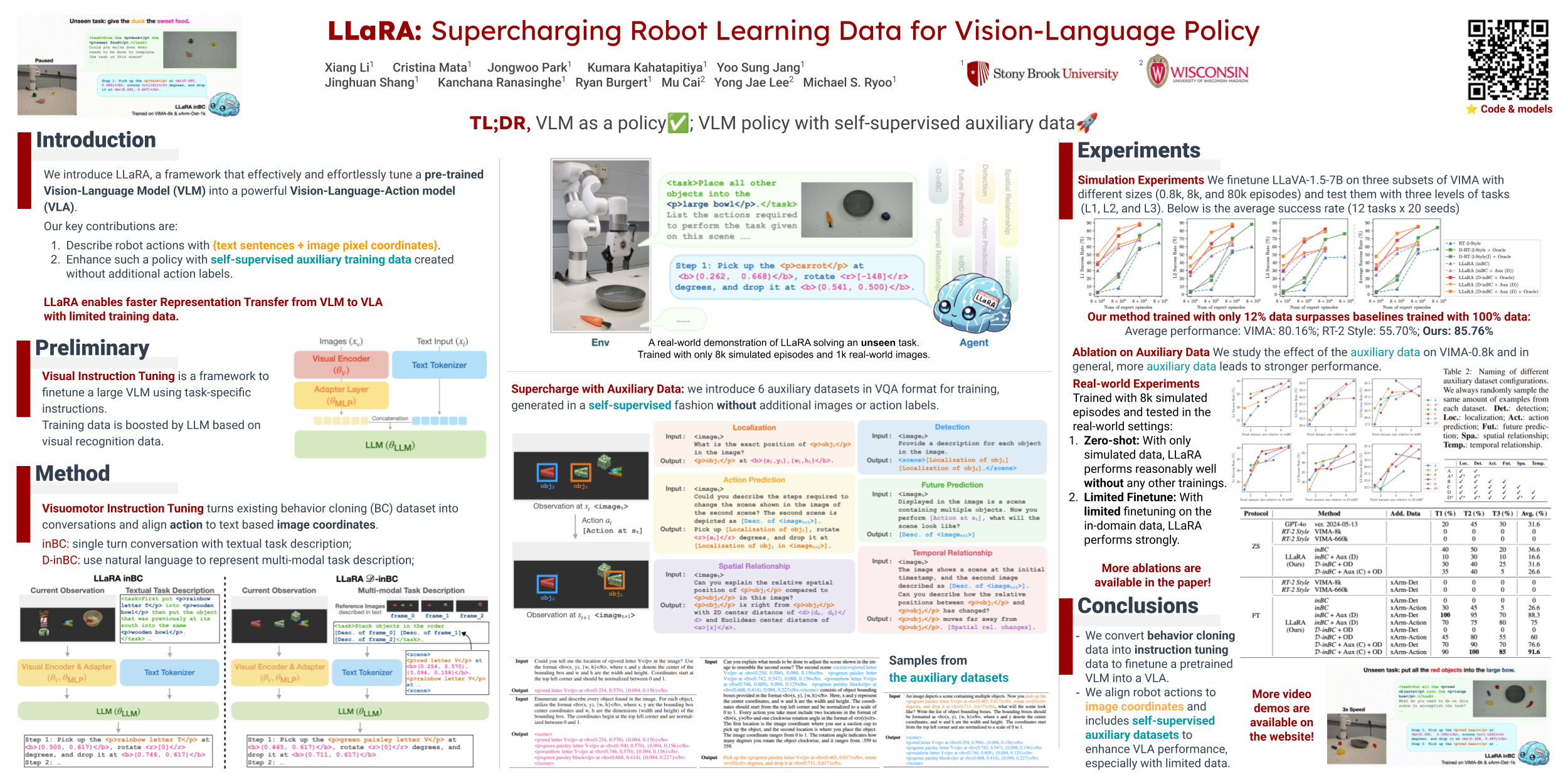
Vision Language Models (VLMs) have recently been leveraged to generate robotic actions, forming Vision-Language-Action (VLA) models. However, directly adapting a pretrained VLM for robotic control remains challenging, particularly when constrained by a limited number of robot demonstrations. In this work, we introduce LLaRA: Large Language and Robotics Assistant, a framework that formulates robot action policy as visuo-textual conversations and enables an efficient transfer of a pretrained VLM into a powerful VLA, motivated by the success of visual instruction tuning in Computer Vision. First, we present an automated pipeline to generate conversation-style instruction tuning data for robots from existing behavior cloning datasets, aligning robotic actions with image pixel coordinates. Further, we enhance this dataset in a self-supervised manner by defining six auxiliary tasks, without requiring any additional action annotations. We show that a VLM finetuned with a limited amount of such datasets can produce meaningful action decisions for robotic control. Through experiments across multiple simulated and real-world tasks, we demonstrate that LLaRA achieves state-of-the-art performance while preserving the generalization capabilities of large language models. The code, datasets, and pretrained models are available at https://github.com/LostXine/LLaRA.