DenseGrounding: Improving Dense Language-Vision Semantics for Ego-centric 3D Visual Grounding
{kind=link}
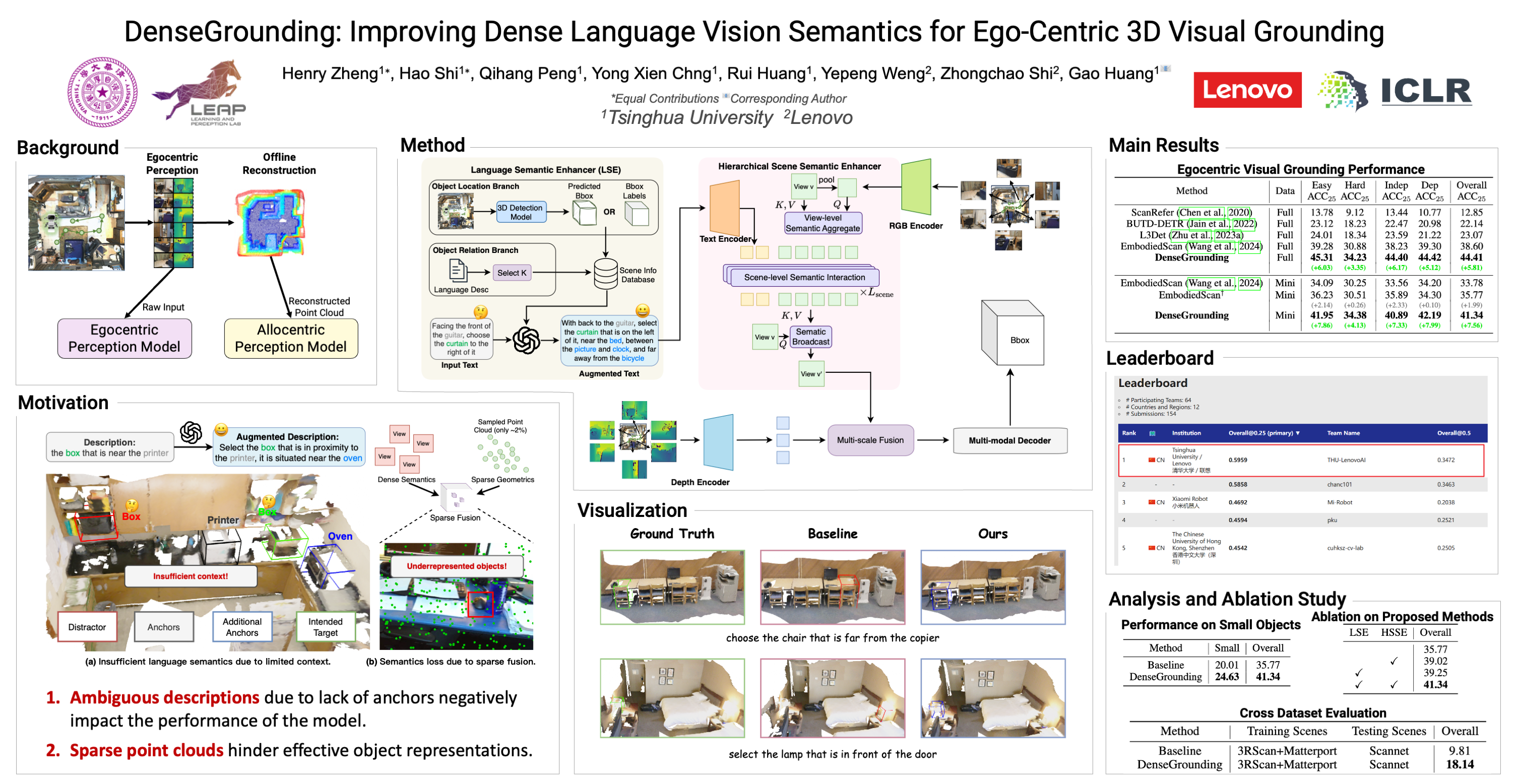
Abstract
Enabling intelligent agents to comprehend and interact with 3D environments through natural language is crucial for advancing robotics and human-computer interaction. A fundamental task in this field is ego-centric 3D visual grounding, where agents locate target objects in real-world 3D spaces based on verbal descriptions. However, this task faces two significant challenges: (1) loss of fine-grained visual semantics due to sparse fusion of point clouds with ego-centric multi-view images, (2) limited textual semantic context due to arbitrary language descriptions. We propose DenseGrounding, a novel approach designed to address these issues by enhancing both visual and textual semantics. For visual features, we introduce the Hierarchical Scene Semantic Enhancer, which retains dense semantics by capturing fine-grained global scene features and facilitating cross-modal alignment. For text descriptions, we propose a Language Semantic Enhancer that leverage large language models to provide rich context and diverse language descriptions with additional context during model training. Extensive experiments show that DenseGrounding significantly outperforms existing methods in overall accuracy, achieving improvements of 5.81% and 7.56% when trained on the comprehensive full training dataset and smaller mini subset, respectively, further advancing the SOTA in ego-centric 3D visual grounding. Our method also achieves 1st place and receives Innovation Award in the 2024 Autonomous Grand Challenge Multi-view 3D Visual Grounding Track, validating its effectiveness and robustness.