MamKO: Mamba-based Koopman operator for modeling and predictive control
{kind=link}
Abstract
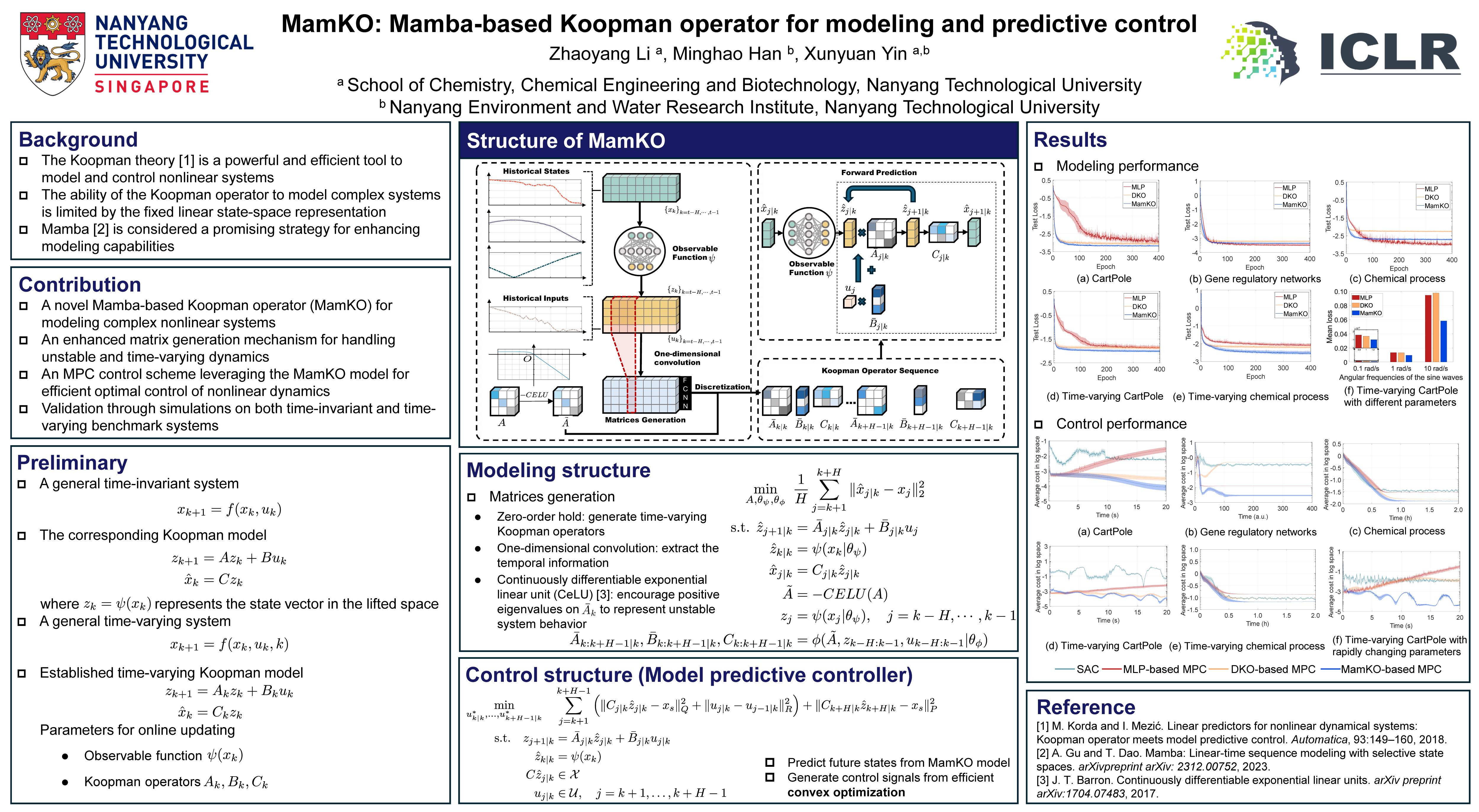
The Koopman theory, which enables the transformation of nonlinear systems into linear representations, is a powerful and efficient tool to model and control nonlinear systems. However, the ability of the Koopman operator to model complex systems, particularly time-varying systems, is limited by the fixed linear state-space representation. To address the limitation, the large language model, Mamba, is considered a promising strategy for enhancing modeling capabilities while preserving the linear state-space structure.In this paper, we propose a new framework, the Mamba-based Koopman operator (MamKO), which provides enhanced model prediction capability and adaptability, as compared to Koopman models with constant Koopman operators. Inspired by the Mamba structure, MamKO generates Koopman operators from online data; this enables the model to effectively capture the dynamic behaviors of the nonlinear system over time. A model predictive control system is then developed based on the proposed MamKO model. The modeling and control performance of the proposed method is evaluated through experiments on benchmark time-invariant and time-varying systems. The experimental results demonstrate the superiority of the proposed approach. Additionally, we perform ablation experiments to test the effectiveness of individual components of MamKO. This approach unlocks new possibilities for integrating large language models with control frameworks, and it achieves a good balance between advanced modeling capabilities and real-time control implementation efficiency.