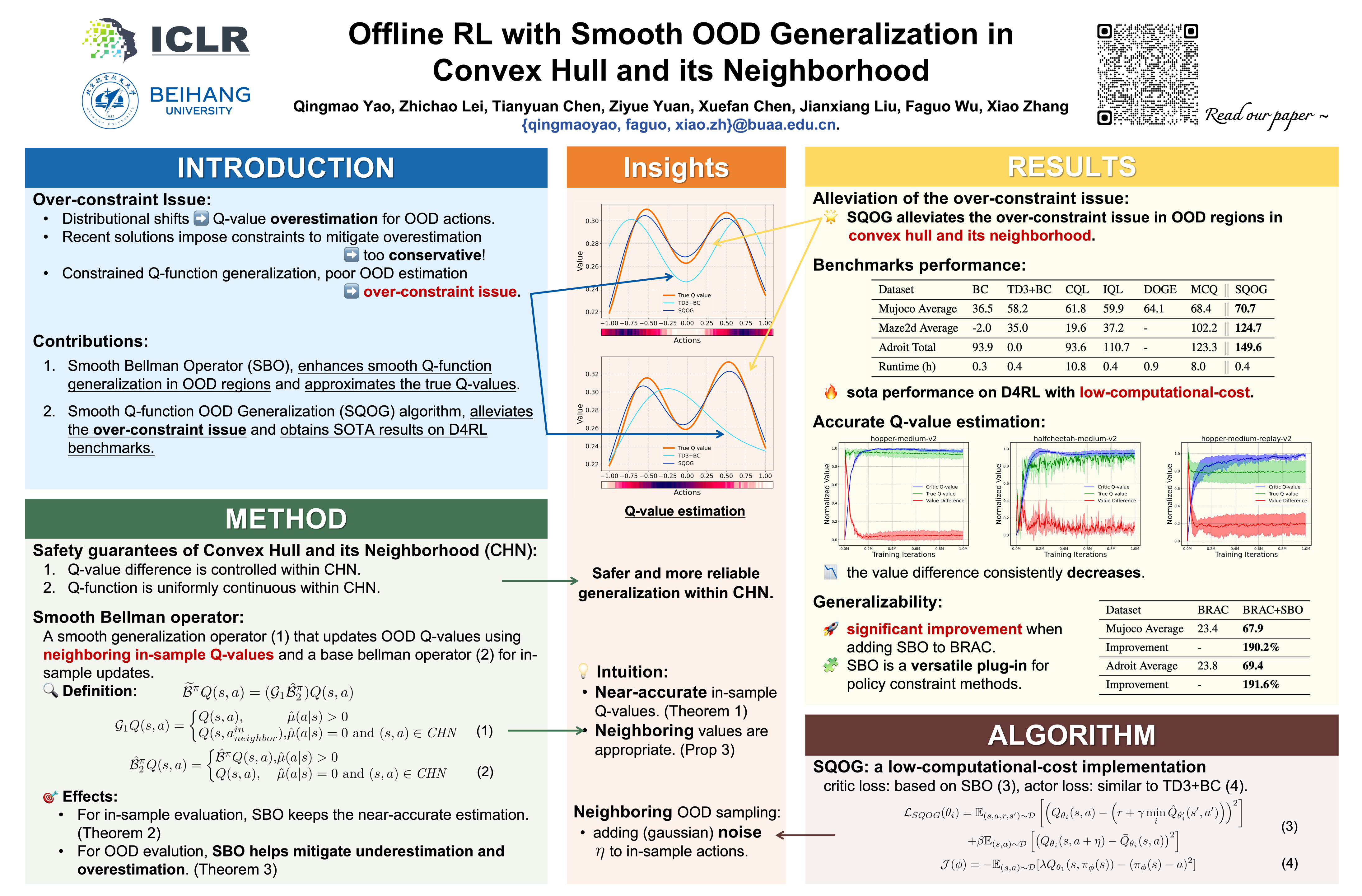
Offline RL with Smooth OOD Generalization in Convex Hull and its Neighborhood
Qingmao Yao ⋅ Zhichao Lei ⋅ Tianyuan Chen ⋅ Ziyue Yuan ⋅ Xuefan Chen ⋅ Jianxiang Liu ⋅ Faguo Wu ⋅ Xiao Zhang
2025 Poster
{kind=link}
Abstract
Offline Reinforcement Learning (RL) struggles with distributional shifts, leading to the $Q$-value overestimation for out-of-distribution (OOD) actions. Existing methods address this issue by imposing constraints; however, they often become overly conservative when evaluating OOD regions, which constrains the $Q$-function generalization. This over-constraint issue results in poor $Q$-value estimation and hinders policy improvement. In this paper, we introduce a novel approach to achieve better $Q$-value estimation by enhancing $Q$-function generalization in OOD regions within Convex Hull and its Neighborhood (CHN). Under the safety generalization guarantees of the CHN, we propose the Smooth Bellman Operator (SBO), which updates OOD $Q$-values by smoothing them with neighboring in-sample $Q$-values. We theoretically show that SBO approximates true $Q$-values for both in-sample and OOD actions within the CHN. Our practical algorithm, Smooth Q-function OOD Generalization (SQOG), empirically alleviates the over-constraint issue, achieving near-accurate $Q$-value estimation. On the D4RL benchmarks, SQOG outperforms existing state-of-the-art methods in both performance and computational efficiency. Code is available at .
Video
Chat is not available.
Successful Page Load