Feedback Favors the Generalization of Neural ODEs
{kind=link}
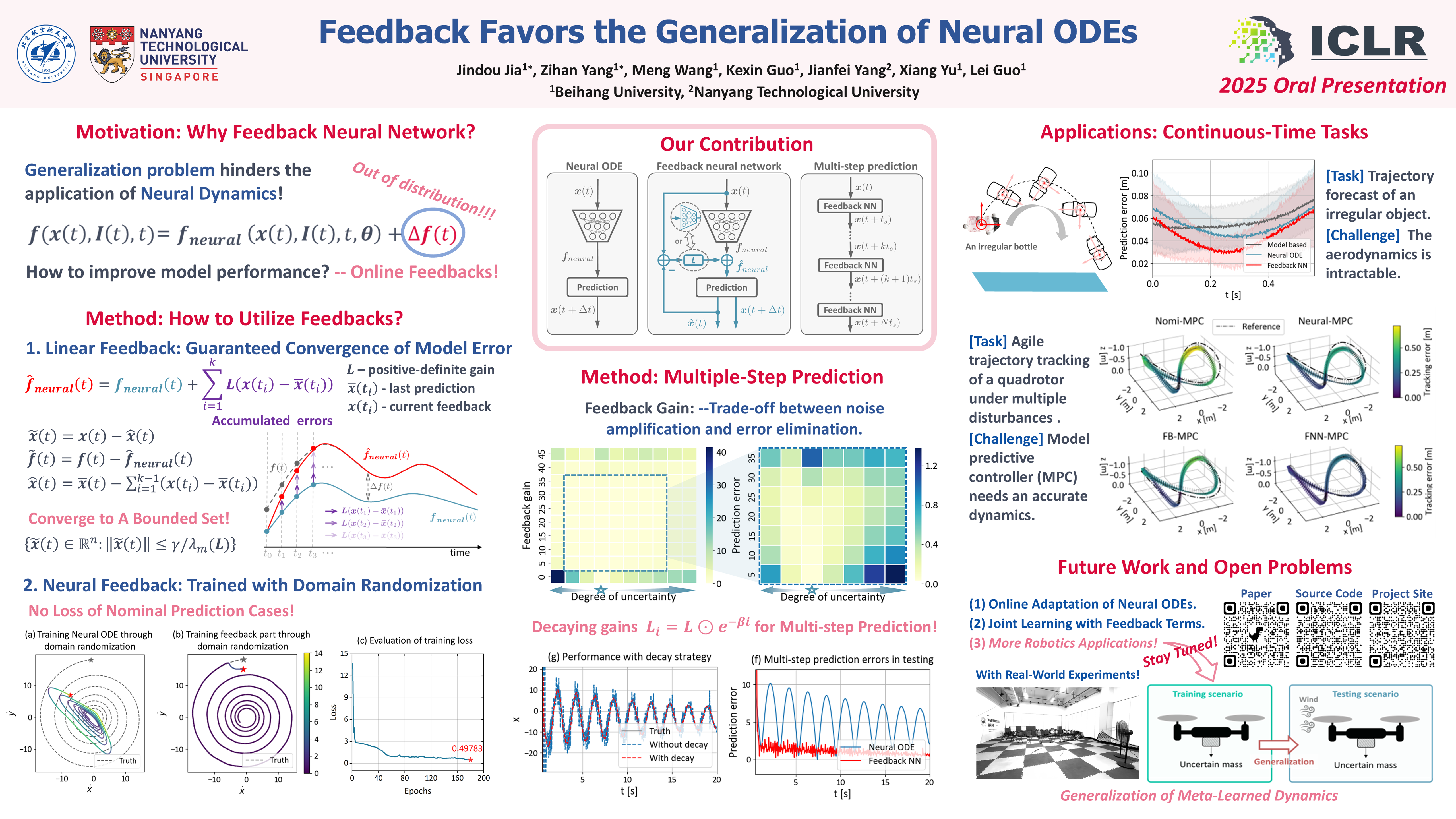
Abstract
The well-known generalization problem hinders the application of artificial neural networks in continuous-time prediction tasks with varying latent dynamics. In sharp contrast, biological systems can neatly adapt to evolving environments benefiting from real-time feedback mechanisms. Inspired by the feedback philosophy, we present feedback neural networks, showing that a feedback loop can flexibly correct the learned latent dynamics of neural ordinary differential equations (neural ODEs), leading to a prominent generalization improvement. The feedback neural network is a novel two-DOF neural network, which possesses robust performance in unseen scenarios with no loss of accuracy performance on previous tasks. A linear feedback form is presented to correct the learned latent dynamics firstly, with a convergence guarantee. Then, domain randomization is utilized to learn a nonlinear neural feedback form. Finally, extensive tests including trajectory prediction of a real irregular object and model predictive control of a quadrotor with various uncertainties, are implemented, indicating significant improvements over state-of-the-art model-based and learning-based methods.