Learning Geometric Reasoning Networks For Robot Task And Motion Planning
{kind=link}
Abstract
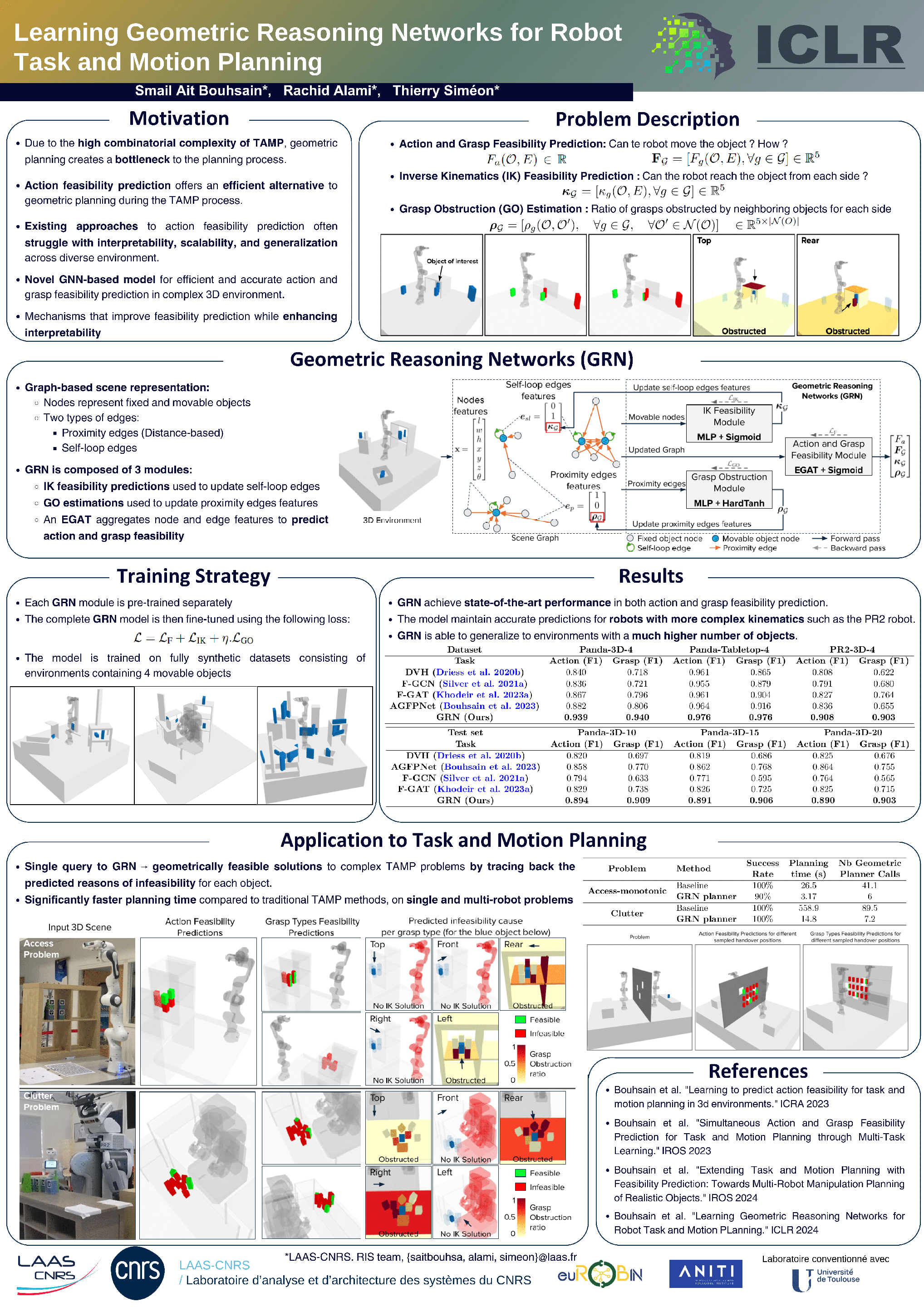
Task and Motion Planning (TAMP) is a computationally challenging robotics problem due to the tight coupling of discrete symbolic planning and continuous geometric planning of robot motions. In particular, planning manipulation tasks in complex 3D environments leads to a large number of costly geometric planner queries to verify the feasibility of considered actions and plan their motions. To address this issue, we propose Geometric Reasoning Networks (GRN), a graph neural network (GNN)-based model for action and grasp feasibility prediction, designed to significantly reduce the dependency on the geometric planner. Moreover, we introduce two key interpretability mechanisms: inverse kinematics (IK) feasibility prediction and grasp obstruction (GO) estimation. These modules not only improve feasibility predictions accuracy, but also explain why certain actions or grasps are infeasible, thus allowing a more efficient search for a feasible solution. Through extensive experimental results, we show that our model outperforms state-of-the-art methods, while maintaining generalizability to more complex environments, diverse object shapes, multi-robot settings, and real-world robots.