ActSafe: Active Exploration with Safety Constraints for Reinforcement Learning
{kind=link}
Abstract
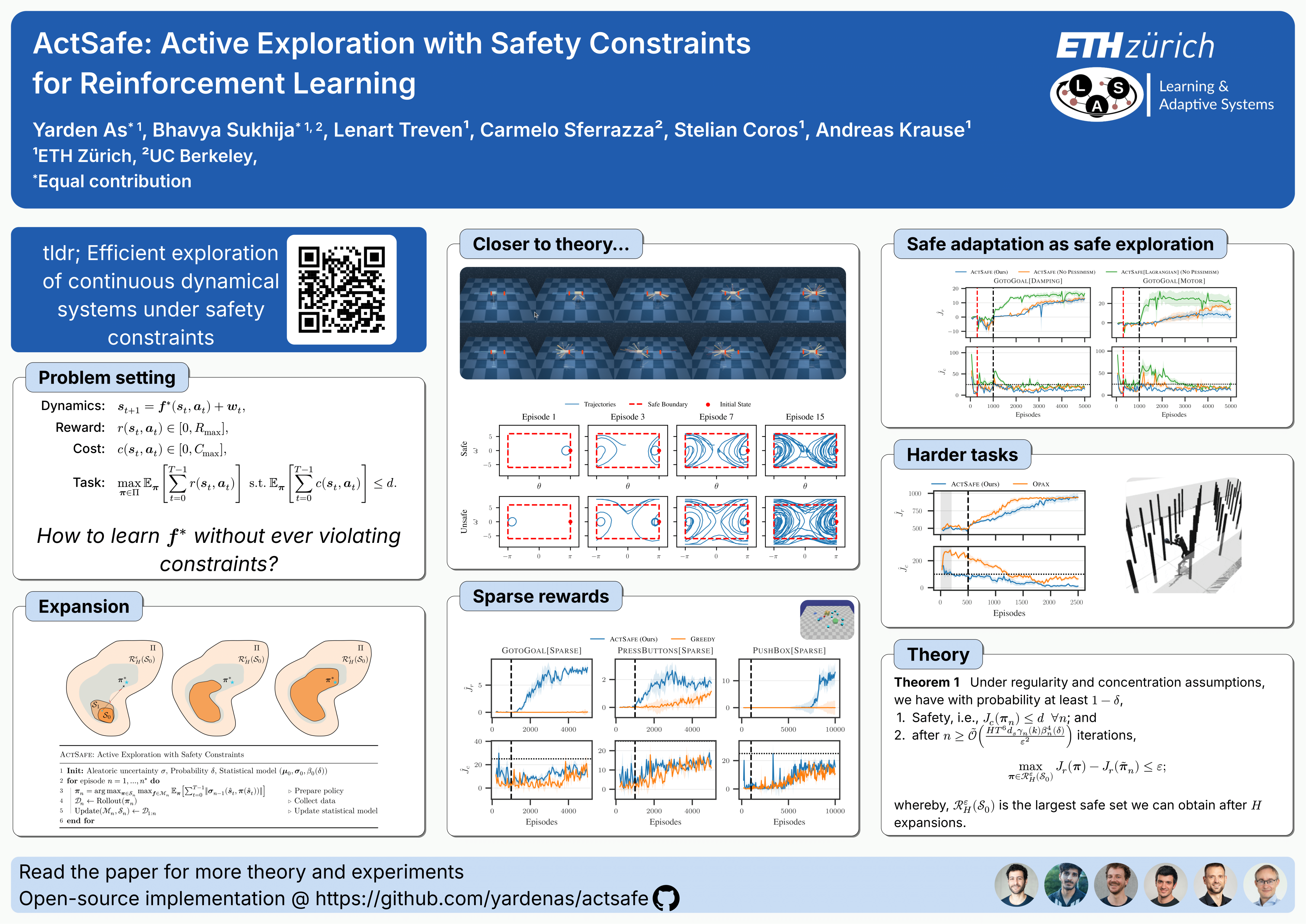
Reinforcement learning (RL) is ubiquitous in the development of modern AI systems. However, state-of-the-art RL agents require extensive, and potentiallyunsafe, interactions with their environments to learn effectively. These limitationsconfine RL agents to simulated environments, hindering their ability to learndirectly in real-world settings. In this work, we present ActSafe, a novelmodel-based RL algorithm for safe and efficient exploration. ActSafe learnsa well-calibrated probabilistic model of the system and plans optimisticallyw.r.t. the epistemic uncertainty about the unknown dynamics, while enforcingpessimism w.r.t. the safety constraints. Under regularity assumptions on theconstraints and dynamics, we show that ActSafe guarantees safety duringlearning while also obtaining a near-optimal policy in finite time. In addition, wepropose a practical variant of ActSafe that builds on latest model-based RL advancements and enables safe exploration even in high-dimensional settings suchas visual control. We empirically show that ActSafe obtains state-of-the-artperformance in difficult exploration tasks on standard safe deep RL benchmarkswhile ensuring safety during learning.