TSC-Net: Prediction of Pedestrian Trajectories by Trajectory-Scene-Cell Classification
{kind=link}
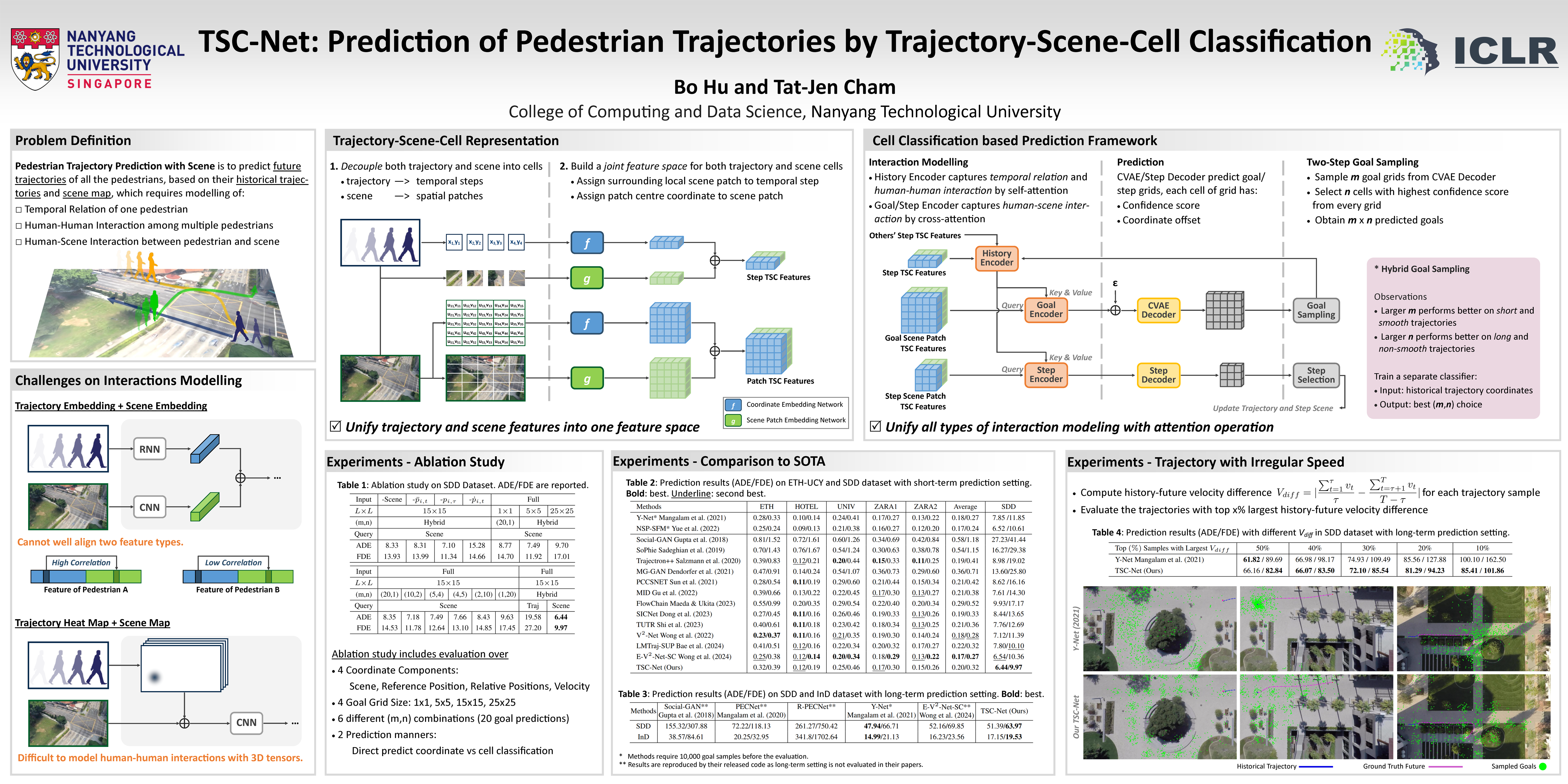
Abstract
To predict future trajectories of pedestrians, scene is as important as the history trajectory since i) scene reflects the position of possible goals of the pedestrian ii) trajectories are affected by the semantic information of the scene. It requires the model to capture scene information and learn the relation between scenes and trajectories. However, existing methods either apply Convolutional Neural Networks (CNNs) to summarize the scene to a feature vector, which raises the feature misalignment issue, or convert trajectory to heatmaps to align with the scene map, which ignores the interactions among different pedestrians. In this work, we introduce the trajectory-scene-cell feature to represent both trajectories and scenes in one feature space. By decoupling the trajectory in temporal domain and the scene in spatial domain, trajectory feature and scene feature are re-organized in different types of cell feature, which well aligns trajectory and scene, and allows the framework to model both human-human and human-scene interactions. Moreover, the Trajectory-Scene-Cell Network (TSC-Net) with new trajectory prediction manner is proposed, where both goal and intermediate positions of the trajectory are predict by cell classification and offset regression. Comparative experiments show that TSC-Net achieves the SOTA performance on several datasets with most of the metrics. Especially for the goal estimation, TSC-Net is demonstrated better on predicting goals for trajectories with irregular speed.