NeSyC: A Neuro-symbolic Continual Learner For Complex Embodied Tasks in Open Domains
{kind=link}
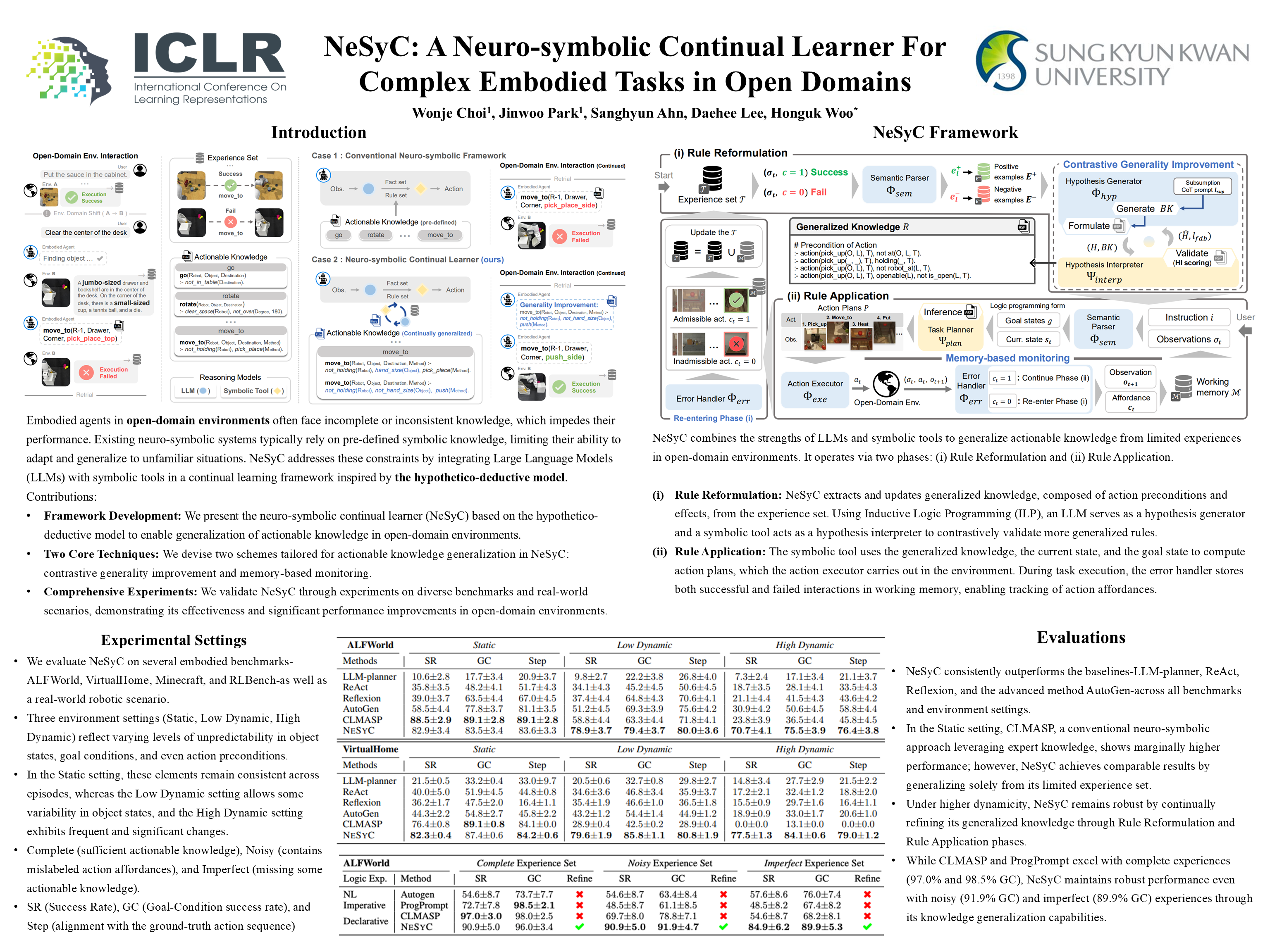
Abstract
We explore neuro-symbolic approaches to generalize actionable knowledge, enabling embodied agents to tackle complex tasks more effectively in open-domain environments. A key challenge for embodied agents is the generalization of knowledge across diverse environments and situations, as limited experiences often confine them to their prior knowledge. To address this issue, we introduce a novel framework, NeSyC, a neuro-symbolic continual learner that emulates the hypothetico-deductive model by continually formulating and validating knowledge from limited experiences through the combined use of Large Language Models (LLMs) and symbolic tools. Specifically, we devise a contrastive generality improvement scheme within NeSyC, which iteratively generates hypotheses using LLMs and conducts contrastive validation via symbolic tools. This scheme reinforces the justification for admissible actions while minimizing the inference of inadmissible ones. Additionally, we incorporate a memory-based monitoring scheme that efficiently detects action errors and triggers the knowledge refinement process across domains. Experiments conducted on diverse embodied task benchmarks—including ALFWorld, VirtualHome, Minecraft, RLBench, and a real-world robotic scenario—demonstrate that NeSyC is highly effective in solving complex embodied tasks across a range of open-domain environments.