VICtoR: Learning Hierarchical Vision-Instruction Correlation Rewards for Long-horizon Manipulation
{kind=link}
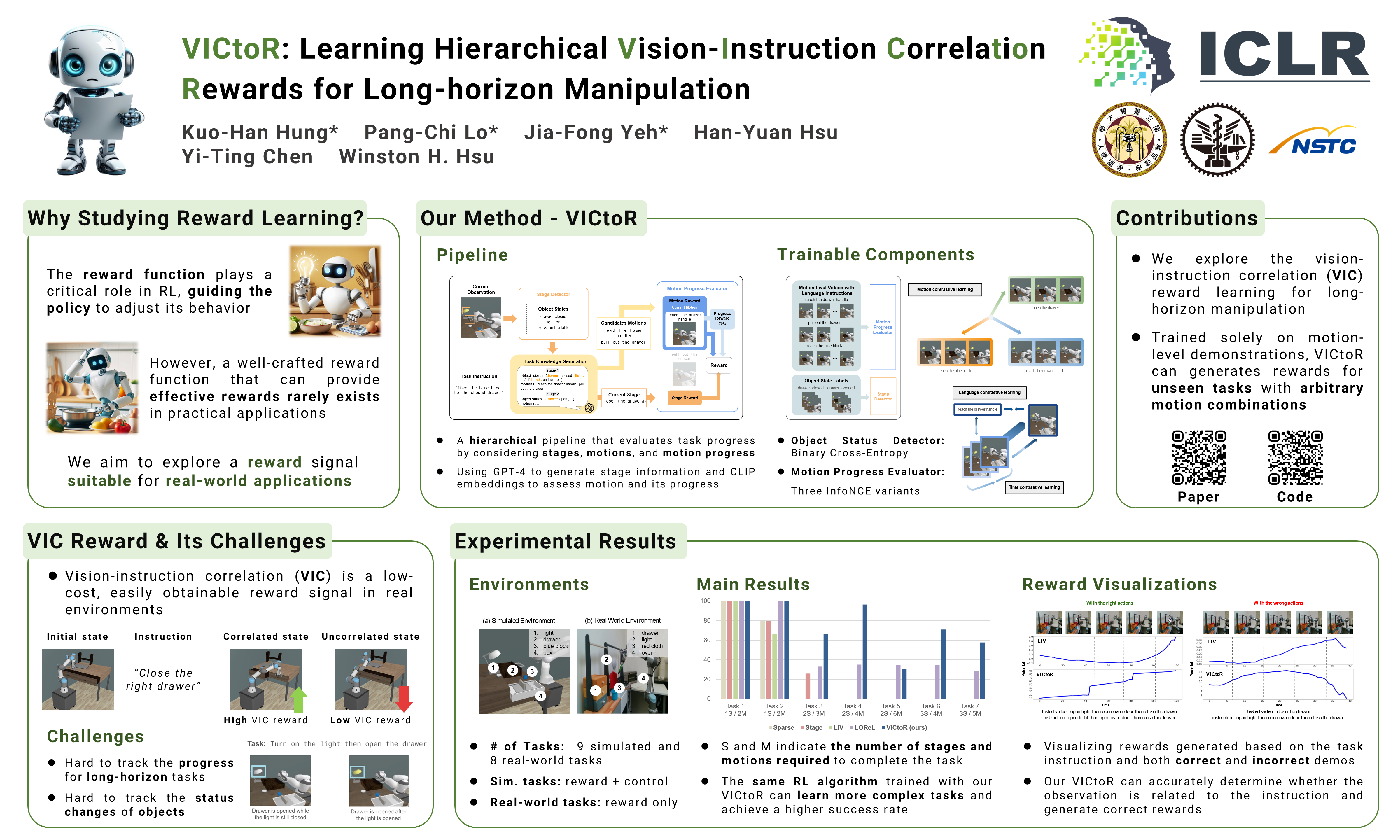
Abstract
We study reward models for long-horizon manipulation by learning from action-free videos and language instructions, which we term the visual-instruction correlation (VIC) problem. Existing VIC methods face challenges in learning rewards for long-horizon tasks due to their lack of sub-stage awareness, difficulty in modeling task complexities, and inadequate object state estimation. To address these challenges,we introduce VICtoR, a novel hierarchical VIC reward model capable of providing effective reward signals for long-horizon manipulation tasks. Trained solely on primitive motion demonstrations, VICtoR effectively provides precise reward signals for long-horizon tasks by assessing task progress at various stages using a novel stage detector and motion progress evaluator. We conducted extensive experiments in both simulated and real-world datasets. The results suggest that VICtoR outperformed the best existing methods, achieving a 43% improvement in success rates for long-horizon tasks. Our project page can be found at https://cmlab-victor.github.io/cmlab-vicotor.github.io/.