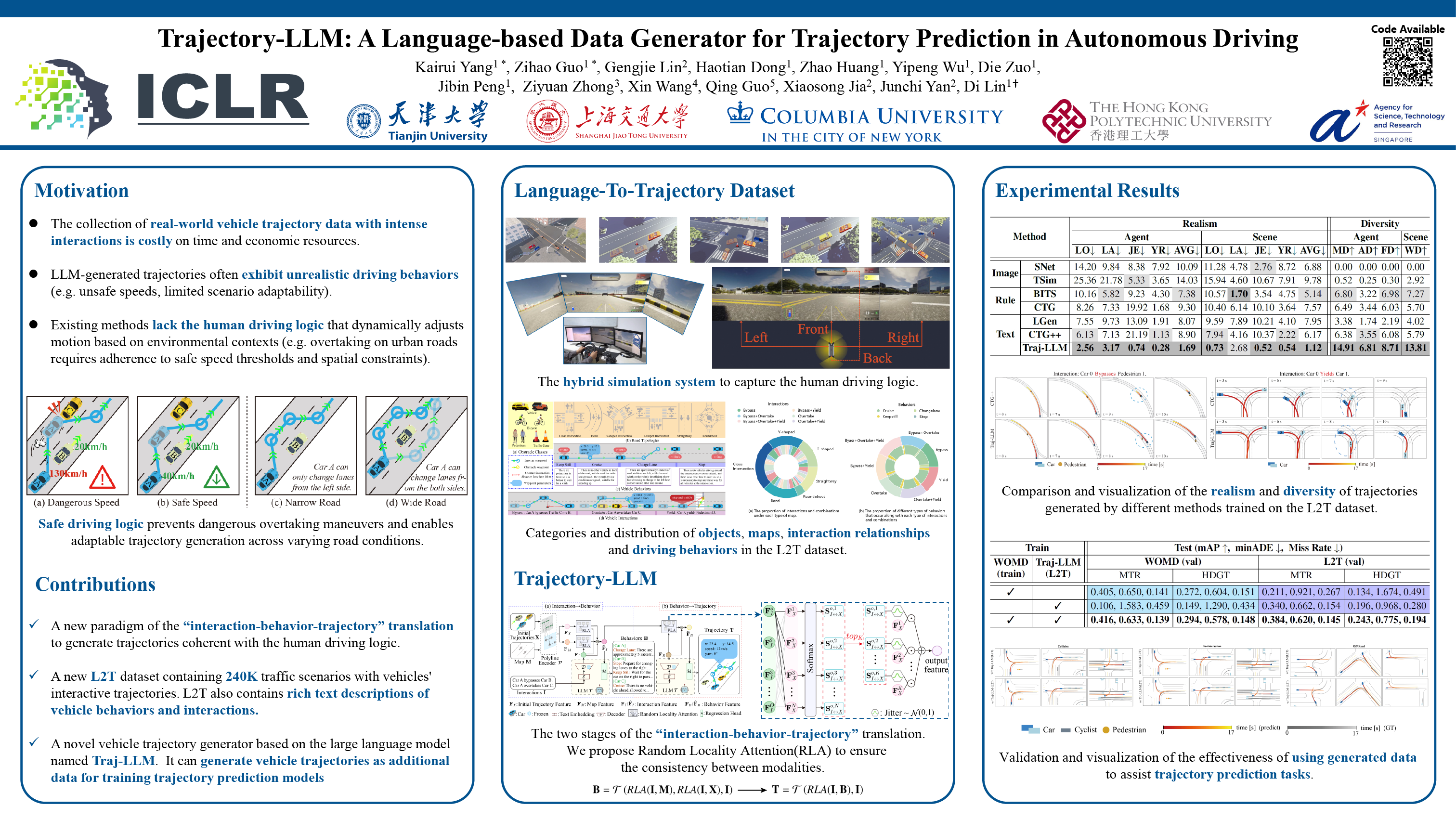
Trajectory-LLM: A Language-based Data Generator for Trajectory Prediction in Autonomous Driving
{kind=link}
Abstract
Vehicle trajectory prediction is a crucial aspect of autonomous driving, which requires extensive trajectory data to train prediction models to understand the complex, varied, and unpredictable patterns of vehicular interactions. However, acquiring real-world data is expensive, so we advocate using Large Language Models (LLMs) to generate abundant and realistic trajectories of interacting vehicles efficiently. These models rely on textual descriptions of vehicle-to-vehicle interactions on a map to produce the trajectories. We introduce Trajectory-LLM (Traj-LLM), a new approach that takes brief descriptions of vehicular interactions as input and generates corresponding trajectories. Unlike language-based approaches that translate text directly to trajectories, Traj-LLM uses reasonable driving behaviors to align the vehicle trajectories with the text. This results in an "interaction-behavior-trajectory" translation process. We have also created a new dataset, Language-to-Trajectory (L2T), which includes 240K textual descriptions of vehicle interactions and behaviors, each paired with corresponding map topologies and vehicle trajectory segments. By leveraging the L2T dataset, Traj-LLM can adapt interactive trajectories to diverse map topologies. Furthermore, Traj-LLM generates additional data that enhances downstream prediction models, leading to consistent performance improvements across public benchmarks. The source code is released at https://github.com/TJU-IDVLab/Traj-LLM.