ClawMachine: Learning to Fetch Visual Tokens for Referential Comprehension
{kind=link}
Abstract
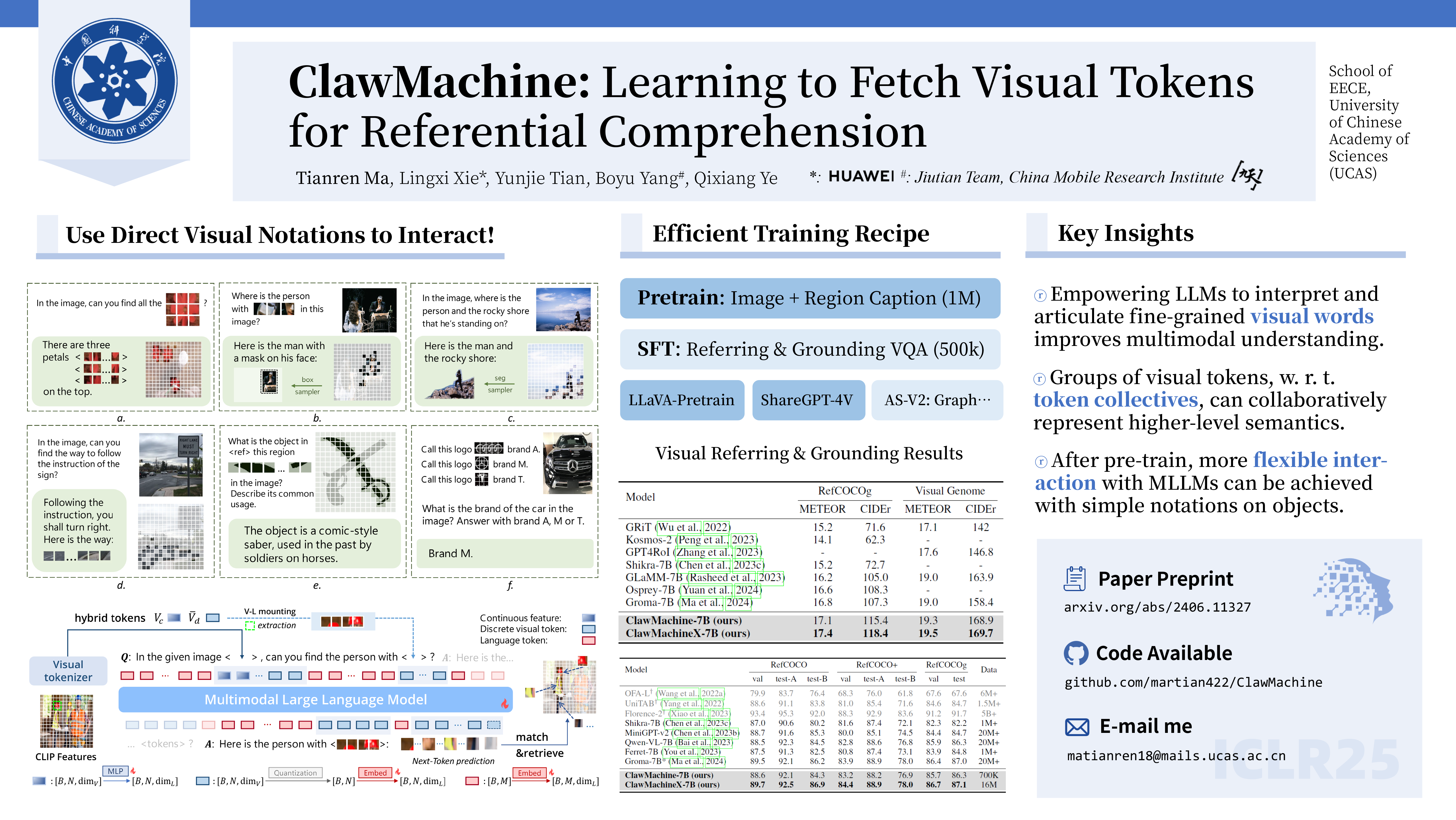
Aligning vision and language concepts at a finer level remains an essential topic of multimodal large language models (MLLMs), particularly for tasks such as referring and grounding. Existing methods, such as proxy encoding and geometry encoding genres, incorporate additional syntax to encode spatial information, imposing extra burdens when communicating between language with vision modules. In this study, we propose ClawMachine, offering a new methodology that explicitly notates each entity using token collectives—groups of visual tokens that collaboratively represent higher-level semantics. A hybrid perception mechanism is also explored to perceive and understand scenes from both discrete and continuous spaces. Our method unifies the prompt and answer of visual referential tasks without using additional syntax. By leveraging a joint vision-language vocabulary, ClawMachine integrates referring and grounding in an auto-regressive manner, demonstrating great potential with scaled up pre-training data. Experiments show that ClawMachine achieves superior performance on scene-level and referential understanding tasks with higher efficiency. It also exhibits the potential to integrate multi-source information for complex visual reasoning, which is beyond the capability of many MLLMs. Our code is available at https://github.com/martian422/ClawMachine.