A Distributional Approach to Uncertainty-Aware Preference Alignment Using Offline Demonstrations
{kind=link}
Abstract
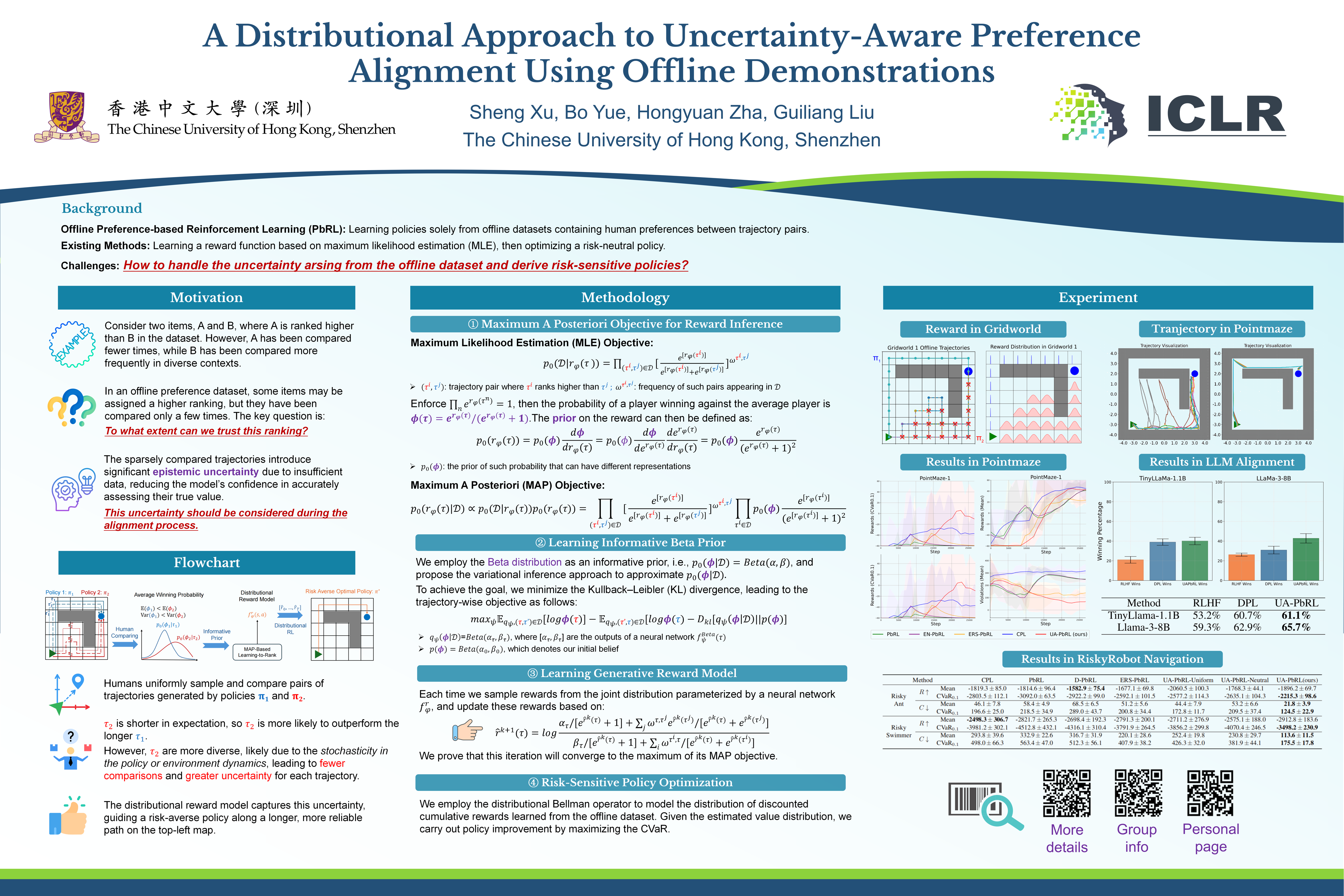
Designing reward functions in Reinforcement Learning (RL) often demands significant task-specific expertise. Offline Preference-based Reinforcement Learning (PbRL) provides an effective alternative to address the complexity of reward design by learning policies from offline datasets that contain human preferences between trajectory pairs. Existing offline PbRL studies typically model a reward function by maximizing its likelihood of generating the observed human preferences. However, due to the varying number of samples within the limited dataset, less frequently compared trajectories exhibit greater uncertainty, which potentially leads to unreliable behaviors during reward and policy updates. To solve this issue, in this work, we introduce Uncertainty-Aware PbRL (UA-PbRL) to learn a distributional reward model and a risk-sensitive policy from an offline preference dataset. Our approach employs a Maximum A Posteriori (MAP) objective to update trajectory rewards and incorporates an informative prior to account for the uncertainties. Building upon this reward update, we propose a generative reward model to capture the reward distribution, utilizing the offline distributional Bellman operator and the Conditional Value-at-Risk (CVaR) metric to train a risk-sensitive policy. Experimental results demonstrate that UA-PbRL effectively identifies and avoids states with high uncertainty, facilitating risk-averse behaviors across various tasks, including robot control and language model alignment. The code is available at https://github.com/Jasonxu1225/UA-PbRL.