Model-Free Offline Reinforcement Learning with Enhanced Robustness
Chi Zhang ⋅ Zain Ulabedeen Farhat ⋅ George Atia ⋅ Yue Wang
2025 Poster
{kind=link}
Abstract
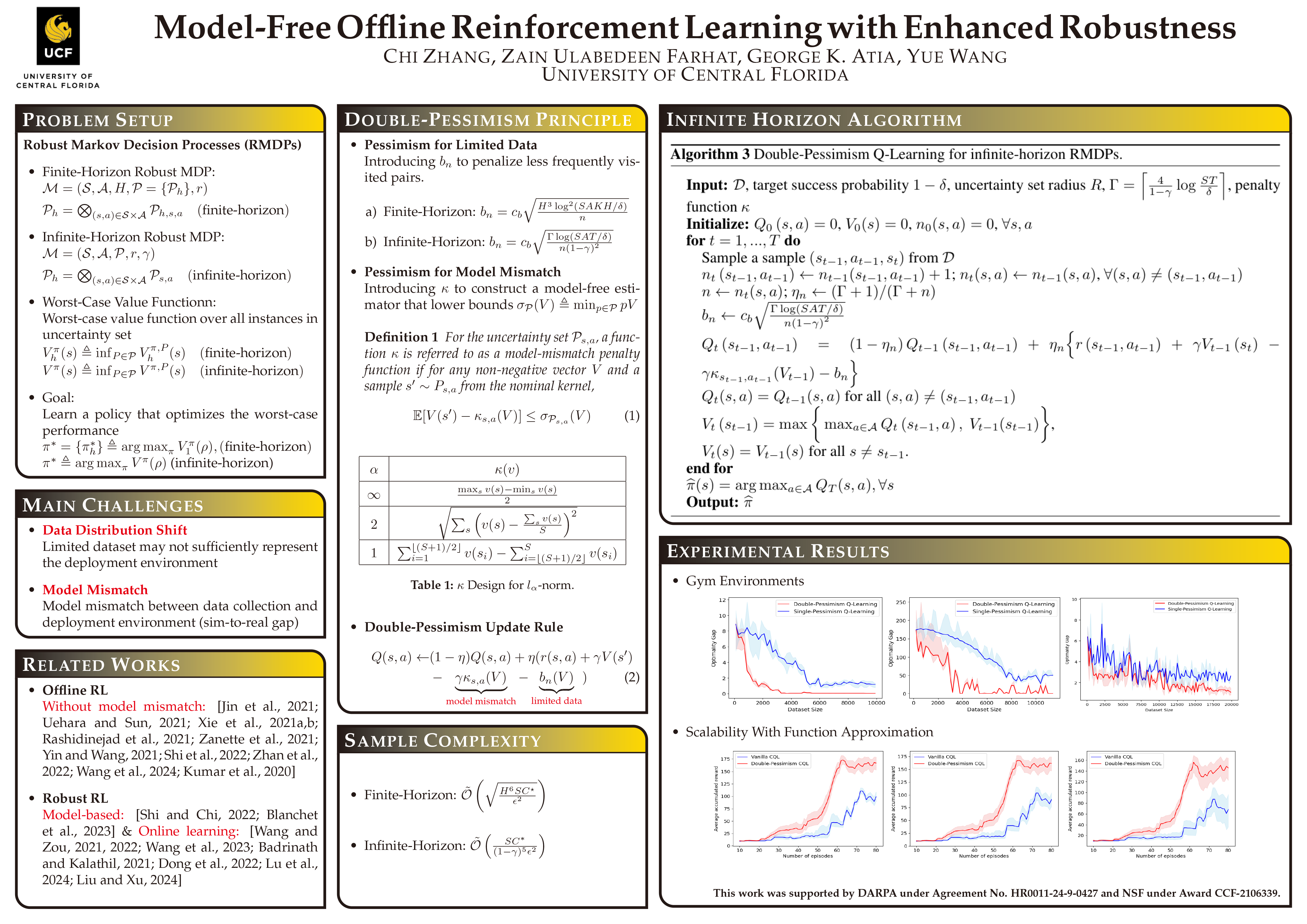
Offline reinforcement learning (RL) has gained considerable attention for its ability to learn policies from pre-collected data without real-time interaction, which makes it particularly useful for high-risk applications. However, due to its reliance on offline datasets, existing works inevitably introduce assumptions to ensure effective learning, which, however, often lead to a trade-off between robustness to model mismatch and scalability to large environments. In this paper, we enhance both aspects with a novel double-pessimism principle, which conservatively estimates performance and accounts for both limited data and potential model mismatches, two major reasons for the previous trade-off. We then propose a universal, model-free algorithm to learn a policy that is robust to potential environment mismatches, which enhances robustness in a scalable manner. Furthermore, we provide a sample complexity analysis of our algorithm when the mismatch is modeled by the $l_\alpha$-norm, which also theoretically demonstrates the efficiency of our method. Extensive experiments further demonstrate that our approach significantly improves robustness in a more scalable manner than existing methods.
Video
Chat is not available.
Successful Page Load