CL-DiffPhyCon: Closed-loop Diffusion Control of Complex Physical Systems
{kind=link}
Abstract
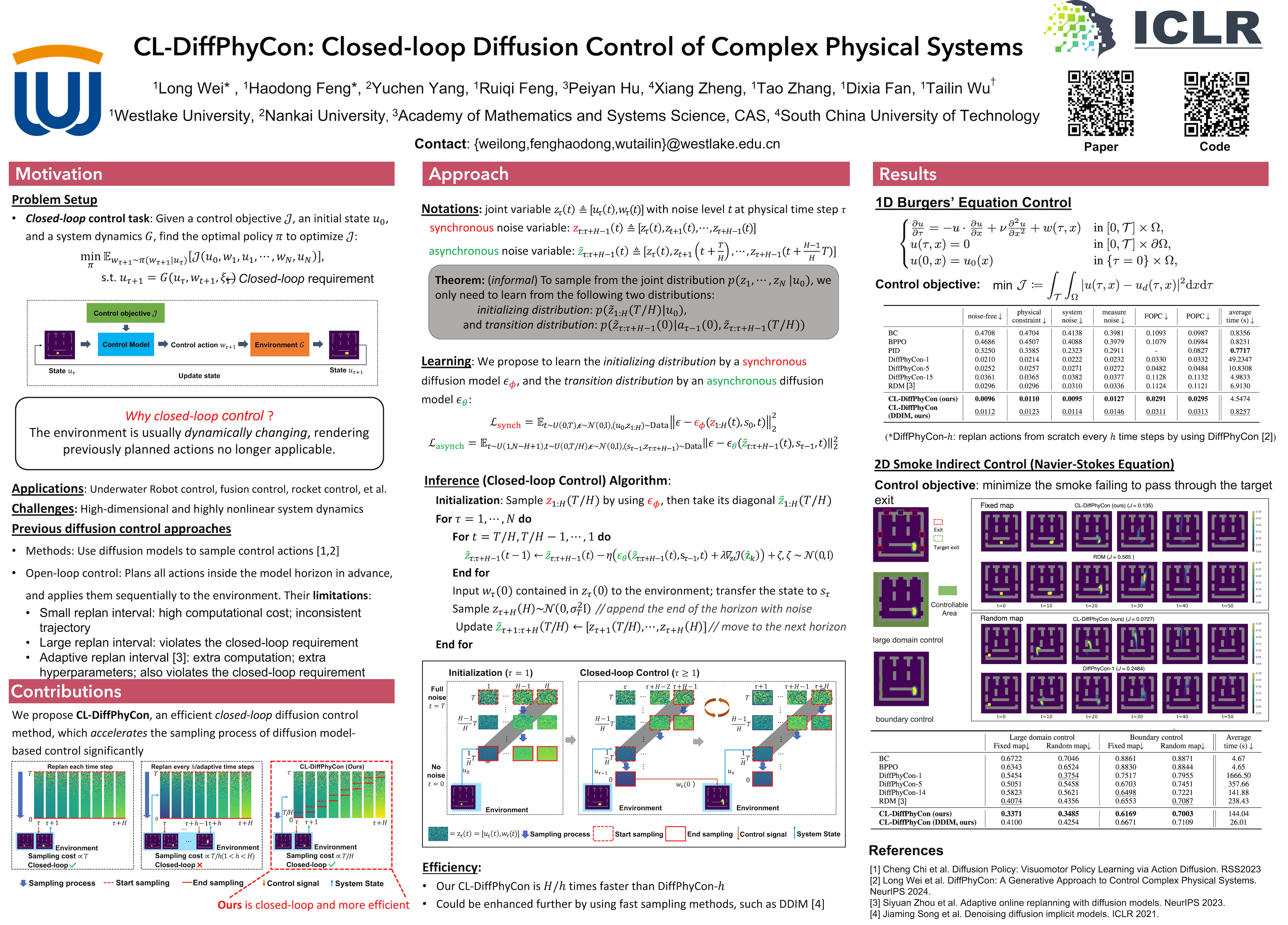
The control problems of complex physical systems have broad applications in science and engineering. Previous studies have shown that generative control methods based on diffusion models offer significant advantages for solving these problems. However, existing generative control approaches face challenges in both performance and efficiency when extended to the closed-loop setting, which is essential for effective control. In this paper, we propose an efficient Closed-Loop Diffusion method for Physical systems Control (CL-DiffPhyCon). By employing an asynchronous denoising framework for different physical time steps, CL-DiffPhyCon generates control signals conditioned on real-time feedback from the system with significantly reduced computational cost during sampling. Additionally, the control process could be further accelerated by incorporating fast sampling techniques, such as DDIM. We evaluate CL-DiffPhyCon on two tasks: 1D Burgers' equation control and 2D incompressible fluid control. The results demonstrate that CL-DiffPhyCon achieves superior control performance with significant improvements in sampling efficiency. The code can be found at https://github.com/AI4Science-WestlakeU/CL_DiffPhyCon.