Learning Robust Representations with Long-Term Information for Generalization in Visual Reinforcement Learning
{kind=link}
Abstract
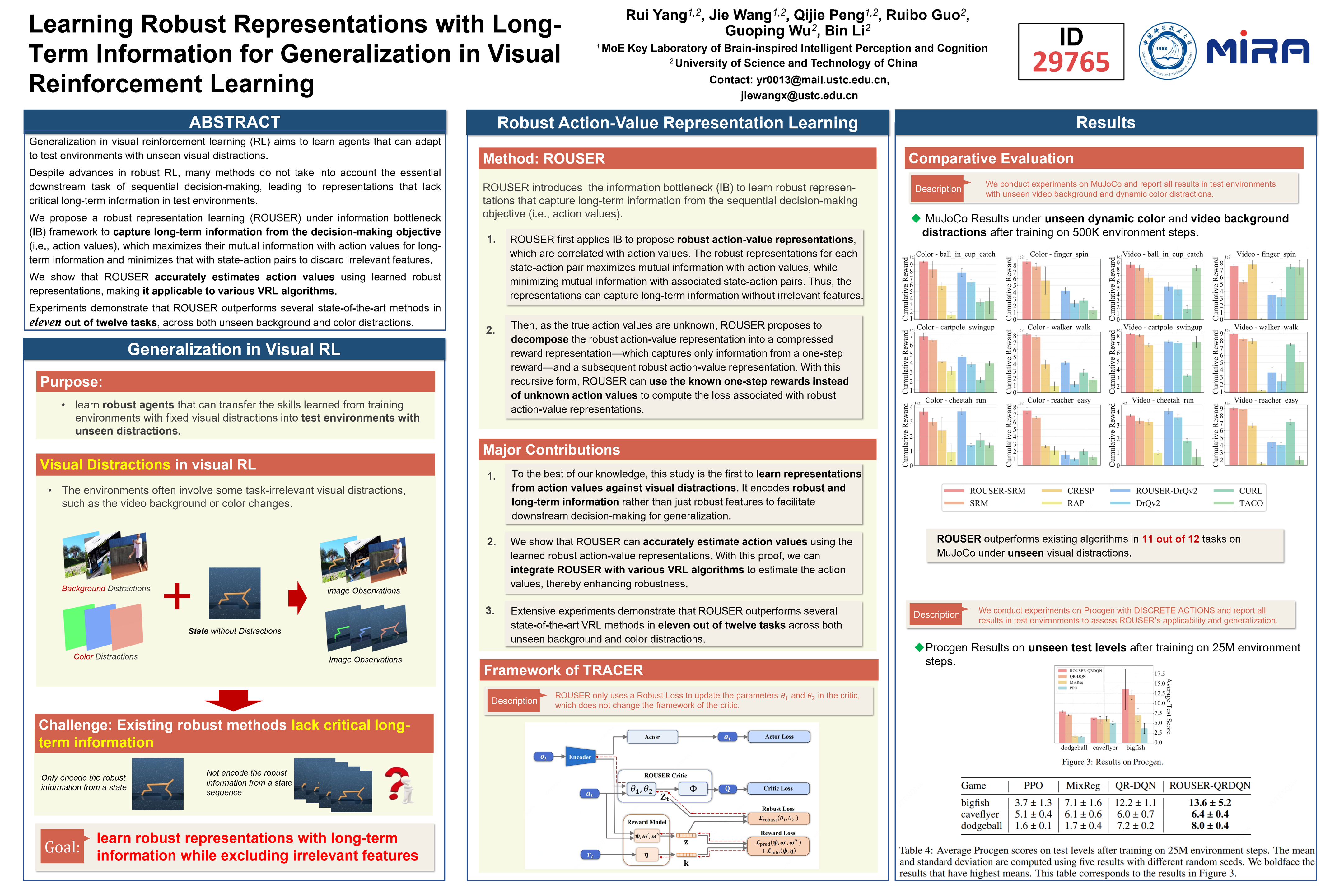
Generalization in visual reinforcement learning (VRL) aims to learn agents that can adapt to test environments with unseen visual distractions. Despite advances in robust representations learning, many methods do not take into account the essential downstream task of sequential decision-making. This leads to representations that lack critical long-term information, impairing decision-making abilities in test environments. To tackle this problem, we propose a novel robust action-value representation learning (ROUSER) under the information bottleneck (IB) framework. ROUSER learns robust representations to capture long-term information from the decision-making objective (i.e., action values). Specifically, ROUSER uses IB to encode robust representations by maximizing their mutual information with action values for long-term information, while minimizing mutual information with state-action pairs to discard irrelevant features. As action values are unknown, ROUSER proposes to decompose robust representations of state-action pairs into one-step rewards and robust representations of subsequent pairs. Thus, it can use known rewards to compute the loss for robust representation learning. Moreover, we show that ROUSER accurately estimates action values using learned robust representations, making it applicable to various VRL algorithms. Experiments demonstrate that ROUSER outperforms several state-of-the-art methods in eleven out of twelve tasks, across both unseen background and color distractions.