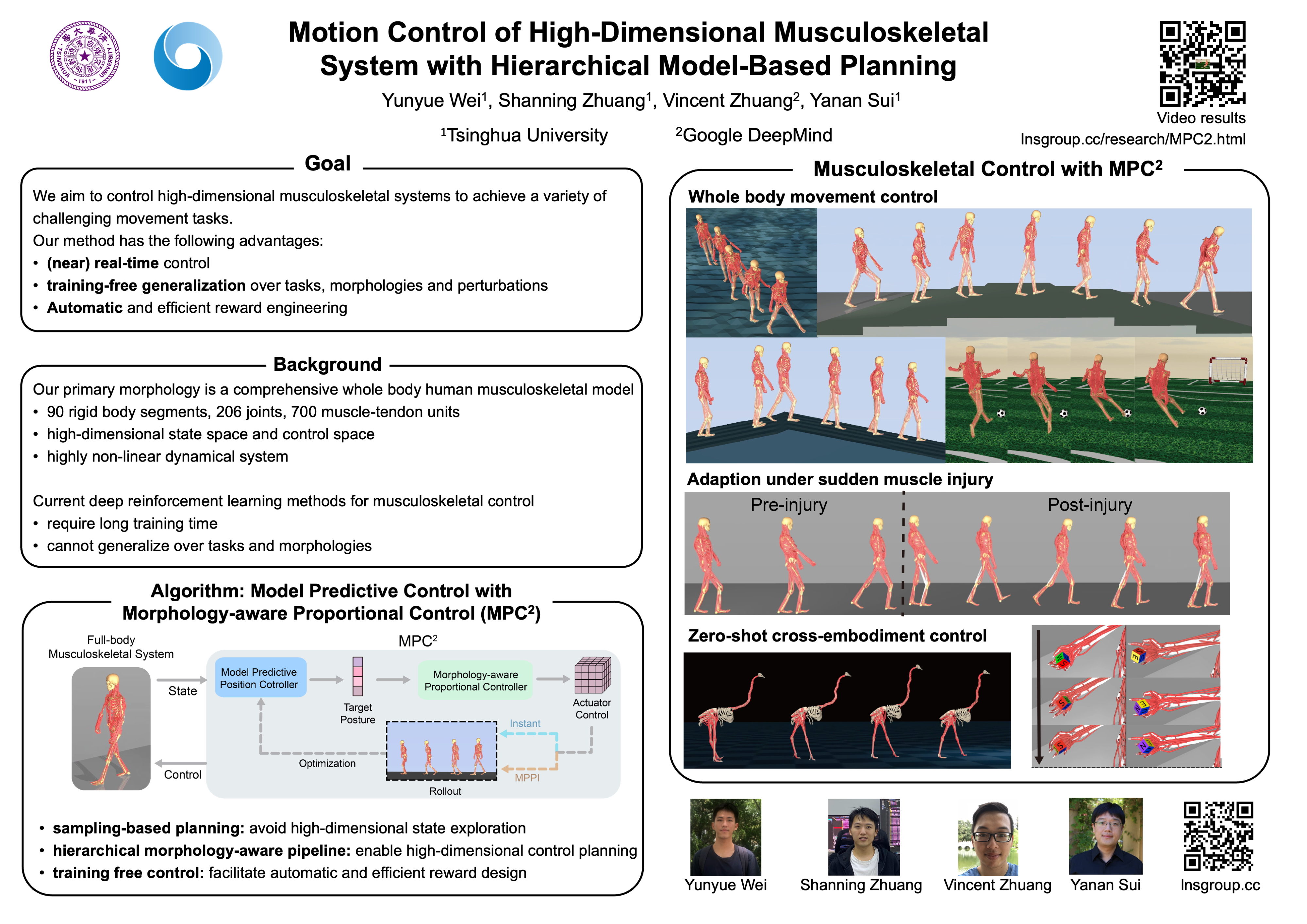
Motion Control of High-Dimensional Musculoskeletal Systems with Hierarchical Model-Based Planning
Yunyue Wei ⋅ Shanning Zhuang ⋅ Vincent Zhuang ⋅ Yanan Sui
2025 Poster
{kind=link}
Abstract
Controlling high-dimensional nonlinear systems, such as those found in biological and robotic applications, is challenging due to large state and action spaces. While deep reinforcement learning has achieved a number of successes in these domains, it is computationally intensive and time consuming, and therefore not suitable for solving large collections of tasks that require significant manual tuning. In this work, we introduce Model Predictive Control with Morphology-aware Proportional Control (MPC$^2$), a hierarchical model-based learning algorithm for zero-shot and near-real-time control of high-dimensional complex dynamical systems. MPC$^2$ uses a sampling-based model predictive controller for target posture planning, and enables robust control for high-dimensional tasks by incorporating a morphology-aware proportional controller for actuator coordination. The algorithm enables motion control of a high-dimensional human musculoskeletal model in a variety of motion tasks, such as standing, walking on different terrains, and imitating sports activities. The reward function of MPC$^2$ can be tuned via black-box optimization, drastically reducing the need for human-intensive reward engineering.
Video
Chat is not available.
Successful Page Load