VLAS: Vision-Language-Action Model with Speech Instructions for Customized Robot Manipulation
{kind=link}
Abstract
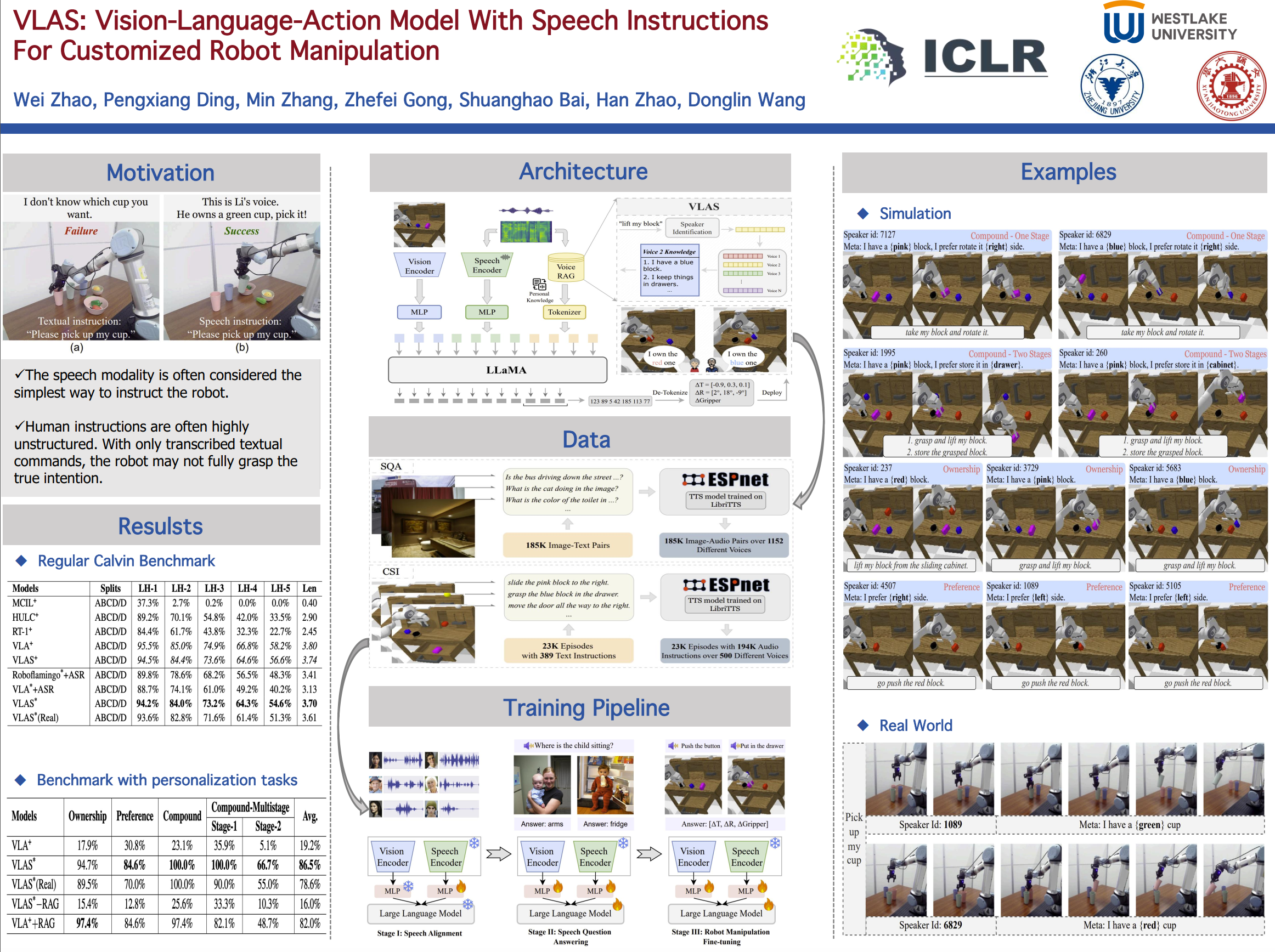
Vision-language-action models (VLAs) have recently become highly prevalent in robot manipulation due to its end-to-end architecture and impressive performance. However, current VLAs are limited to processing human instructions in textual form, neglecting the more natural speech modality for human interaction. A typical approach of incorporating speech modality into VLA necessitates a separate speech recognition system to transcribe spoken instructions into text. Such a cascading pipeline raises two major concerns for robotic systems. First, the entire model grows in size and complexity, potentially resulting in redundant computations and increased memory consumption. Second, the transcription procedure would lose non-semantic information in the raw speech, such as voiceprint, which is crucial for a robot to successfully understand and complete customized tasks. To this end, we propose VLAS, the fisrt end-to-end policy model that seamlessly integrates speech modality for robot manipulation. We present a three-stage speech instruction tuning strategy leveraging multimodal datasets, including our manually curated SQA and CSI datasets. Furthermore, to facilitate personalized operations, we develop a voice retrieval-augmented generation (RAG) approach to enhance the robot's performance in tasks requiring individual-specific knowledge. Experimental results show that the proposed VLAS, following either textual or speech instructions, can achieve performance comparable to traditional VLAs on the CALVIN benchmark. In addition, we created a benchmark consisting of customization tasks, where our VLAS demonstrates absolute superiority by fully leveraging the auxiliary information in speech.