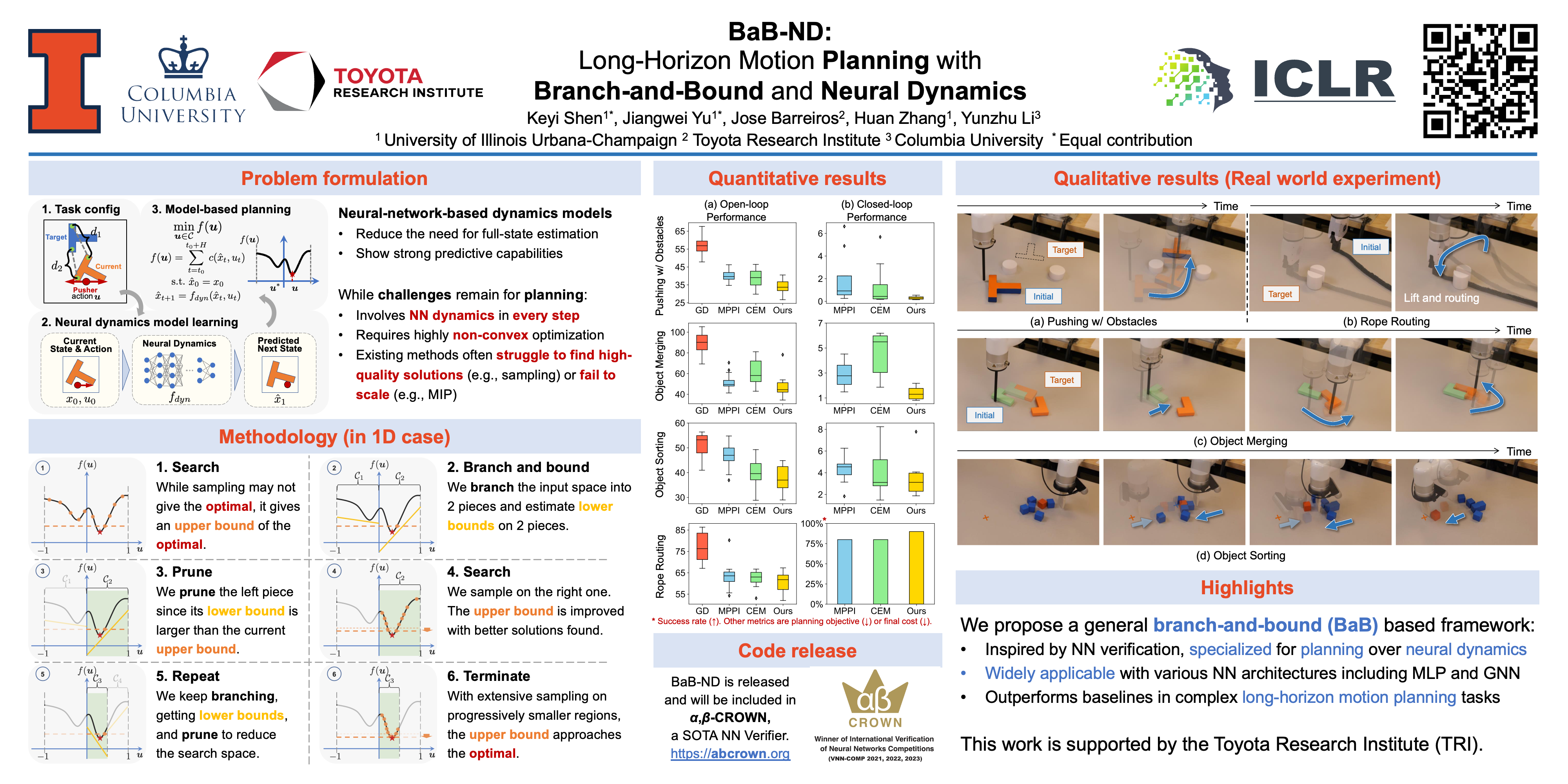
BaB-ND: Long-Horizon Motion Planning with Branch-and-Bound and Neural Dynamics
Keyi Shen ⋅ Jiangwei Yu ⋅ Jose Barreiros ⋅ Huan Zhang ⋅ Yunzhu Li
2025 Poster
{kind=link}
Abstract
Neural-network-based dynamics models learned from observational data have shown strong predictive capabilities for scene dynamics in robotic manipulation tasks. However, their inherent non-linearity presents significant challenges for effective planning. Current planning methods, often dependent on extensive sampling or local gradient descent, struggle with long-horizon motion planning tasks involving complex contact events.In this paper, we present a GPU-accelerated branch-and-bound (BaB) framework for motion planning in manipulation tasks that require trajectory optimization over neural dynamics models. Our approach employs a specialized branching heuristic to divide the search space into sub-domains and applies a modified bound propagation method, inspired by the state-of-the-art neural network verifier $\alpha,\beta$-CROWN, to efficiently estimate objective bounds within these sub-domains. The branching process guides planning effectively, while the bounding process strategically reduces the search space.Our framework achieves superior planning performance, generating high-quality state-action trajectories and surpassing existing methods in challenging, contact-rich manipulation tasks such as non-prehensile planar pushing with obstacles, object sorting, and rope routing in both simulated and real-world settings. Furthermore, our framework supports various neural network architectures, ranging from simple multilayer perceptrons to advanced graph neural dynamics models, and scales efficiently with different model sizes.
Video
Chat is not available.
Successful Page Load