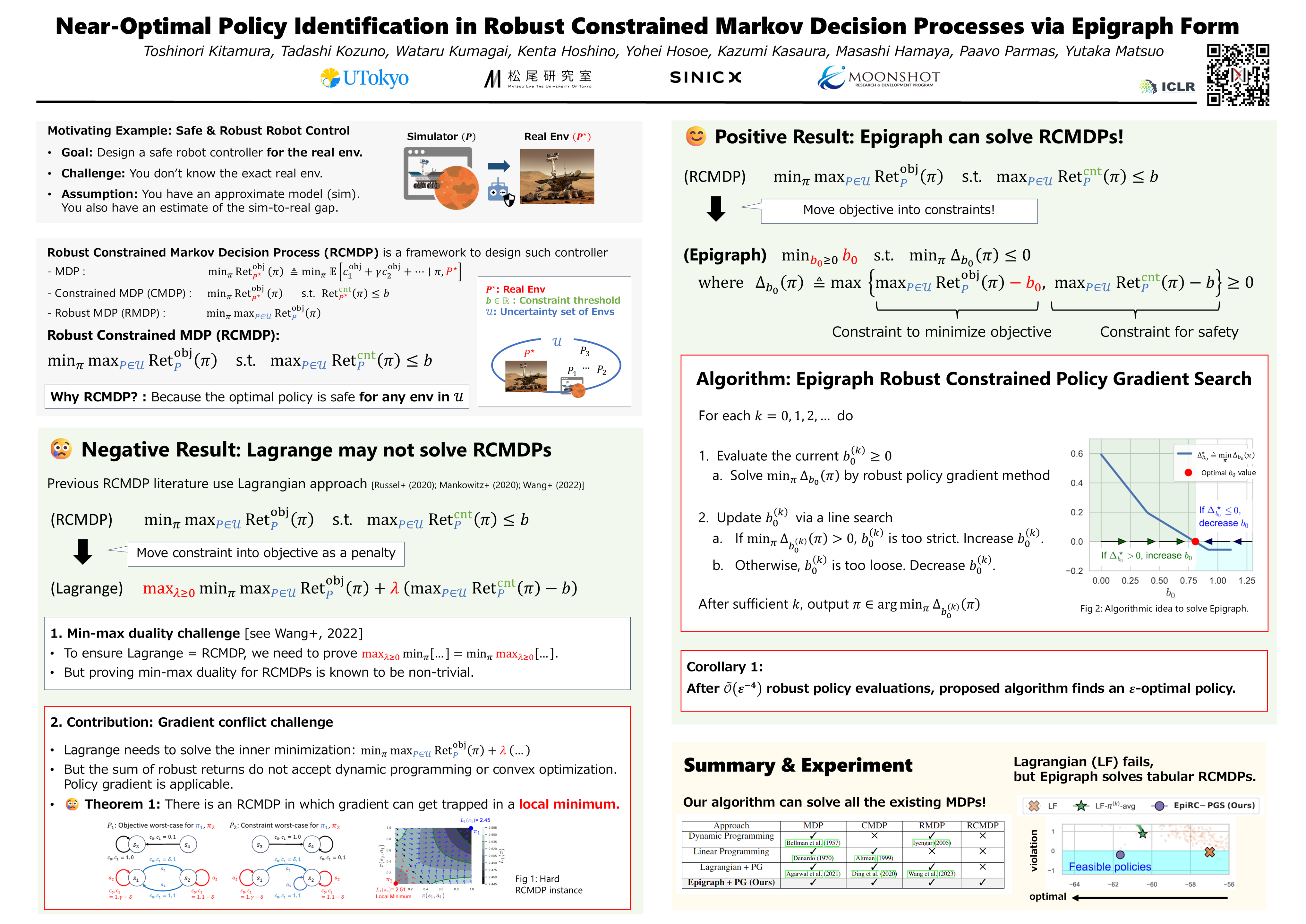
Near-Optimal Policy Identification in Robust Constrained Markov Decision Processes via Epigraph Form
Toshinori Kitamura ⋅ Tadashi Kozuno ⋅ Wataru Kumagai ⋅ Kenta Hoshino ⋅ Yohei Hosoe ⋅ Kazumi Kasaura ⋅ Masashi Hamaya ⋅ Paavo Parmas ⋅ Yutaka Matsuo
2025 Poster
{kind=link}
Abstract
Designing a safe policy for uncertain environments is crucial in real-world control systems. However, this challenge remains inadequately addressed within the Markov decision process (MDP) framework. This paper presents the first algorithm guaranteed to identify a near-optimal policy in a robust constrained MDP (RCMDP), where an optimal policy minimizes cumulative cost while satisfying constraints in the worst-case scenario across a set of environments. We first prove that the conventional policy gradient approach to the Lagrangian max-min formulation can become trapped in suboptimal solutions. This occurs when its inner minimization encounters a sum of conflicting gradients from the objective and constraint functions. To address this, we leverage the epigraph form of the RCMDP problem, which resolves the conflict by selecting a single gradient from either the objective or the constraints. Building on the epigraph form, we propose a bisection search algorithm with a policy gradient subroutine and prove that it identifies an $\varepsilon$-optimal policy in an RCMDP with $\widetilde{\mathcal{O}}(\varepsilon^{-4})$ robust policy evaluations.
Video
Chat is not available.
Successful Page Load