Bisimulation Metric for Model Predictive Control
{kind=link}
Abstract
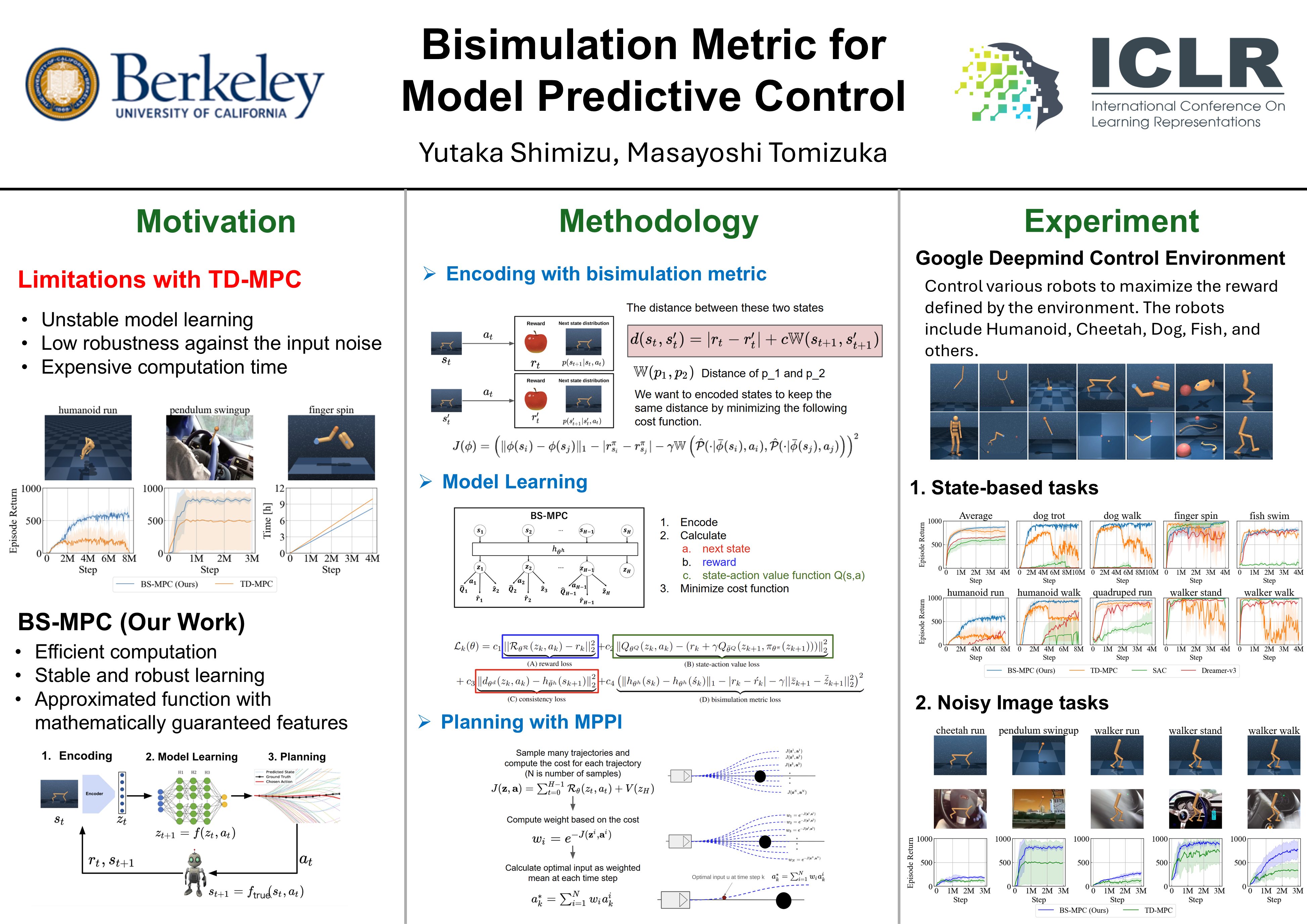
Model-based reinforcement learning (MBRL) has shown promise for improving sample efficiency and decision-making in complex environments. However, existing methods face challenges in training stability, robustness to noise, and computational efficiency. In this paper, we propose Bisimulation Metric for Model Predictive Control (BS-MPC), a novel approach that incorporates bisimulation metric loss in its objective function to directly optimize the encoder. This optimization enables the learned encoder to extract intrinsic information from the original state space while discarding irrelevant details. BS-MPC improves training stability, robustness against input noise, and computational efficiency by reducing training time. We evaluate BS-MPC on both continuous control and image-based tasks from the DeepMind Control Suite, demonstrating superior performance and robustness compared to state-of-the-art baseline methods.