Agent-Oriented Planning in Multi-Agent Systems
{kind=link}
Abstract
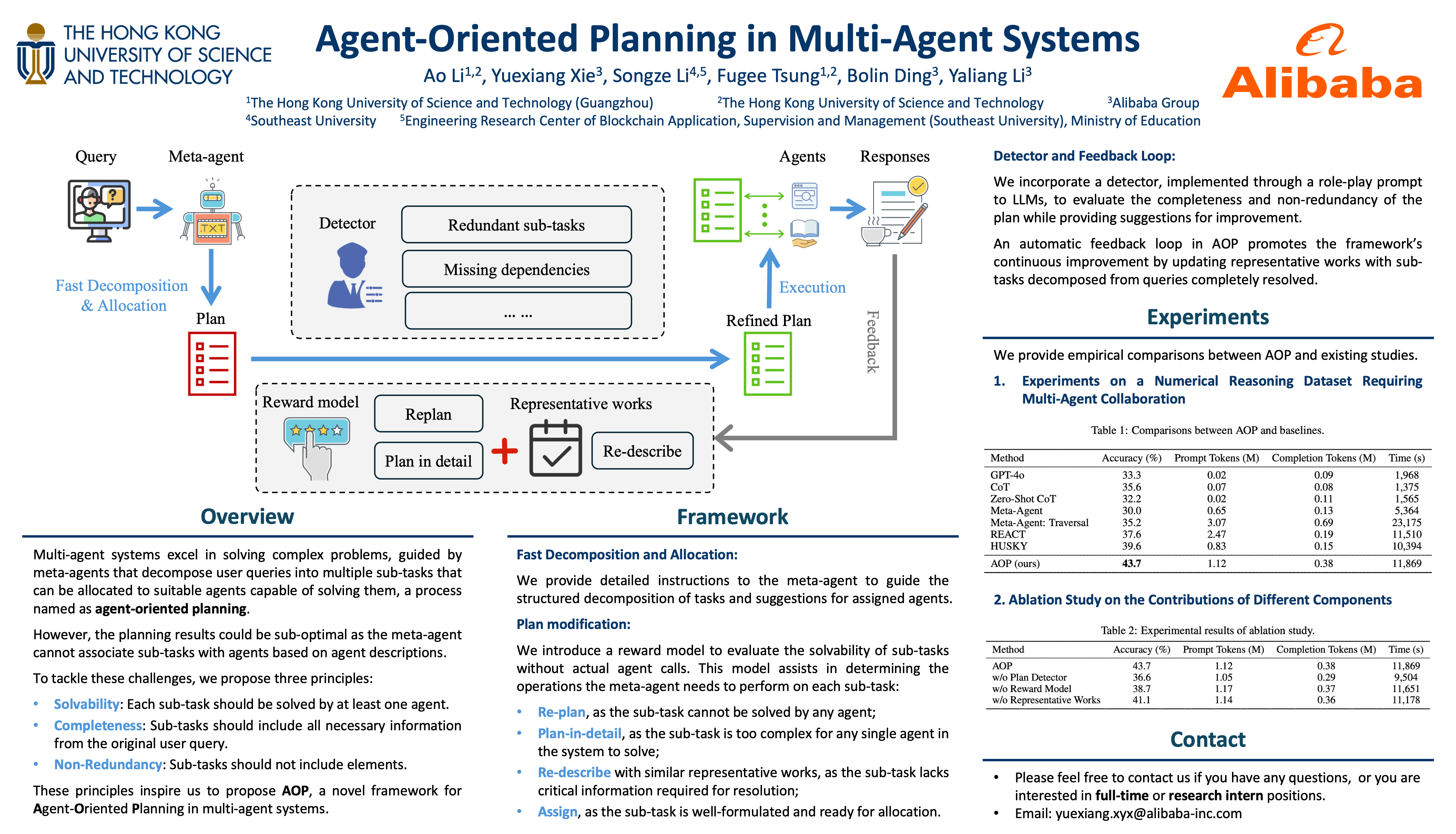
Through the collaboration of multiple LLM-empowered agents possessing diverse expertise and tools, multi-agent systems achieve impressive progress in solving real-world problems. Given the user queries, the meta-agents, serving as the brain within multi-agent systems, are required to decompose the queries into multiple sub-tasks that can be allocated to suitable agents capable of solving them, so-called agent-oriented planning. In this study, we identify three critical design principles of agent-oriented planning, including solvability, completeness, and non-redundancy, to ensure that each sub-task can be effectively resolved, resulting in satisfactory responses to user queries. These principles further inspire us to propose AOP, a novel framework for agent-oriented planning in multi-agent systems, leveraging a fast task decomposition and allocation process followed by an effective and efficient evaluation via a reward model. According to the evaluation results, the meta-agent is also responsible for promptly making necessary adjustments to sub-tasks and scheduling. Besides, we integrate a feedback loop into AOP to further enhance the effectiveness and robustness of such a problem-solving process. Extensive experiments demonstrate the advancement of AOP in solving real-world problems compared to both single-agent systems and existing planning strategies for multi-agent systems. The source code is available at https://github.com/lalaliat/Agent-Oriented-Planning