Interactive Adjustment for Human Trajectory Prediction with Individual Feedback
{kind=link}
Abstract
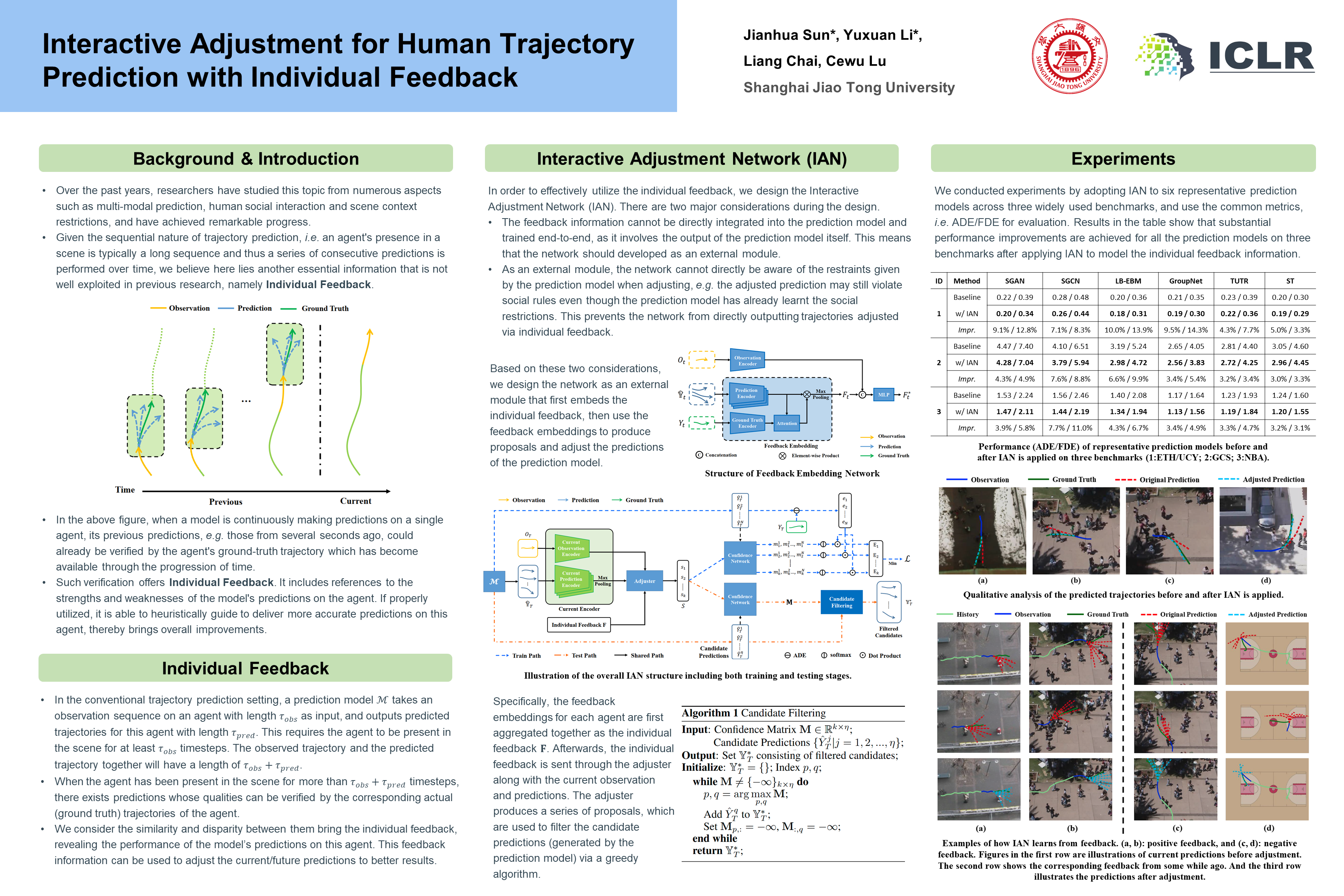
Human trajectory prediction is fundamental for autonomous driving and service robot. The research community has studied various important aspects of this task and made remarkable progress recently. However, there is an essential perspective which is not well exploited in previous research all along, namely individual feedback. Individual feedback exists in the sequential nature of trajectory prediction, where earlier predictions of a target can be verified over time by his ground-truth trajectories to obtain feedback which provides valuable experience for subsequent predictions on the same agent. In this paper, we show such feedback can reveal the strengths and weaknesses of the model's predictions on a specific target and heuristically guide to deliver better predictions on him. We present an interactive adjustment network to effectively model and leverage the feedback. This network first exploits the feedback from previous predictions to dynamically generate an adjuster which then interactively makes appropriate adjustments to current predictions for more accurate ones. We raise a novel displacement expectation loss to train this interactive architecture. Through experiments on representative prediction methods and widely-used benchmarks, we demonstrate the great value of individual feedback and the superior effectiveness of proposed interactive adjustment network.