Learning Shape-Independent Transformation via Spherical Representations for Category-Level Object Pose Estimation
{kind=link}
Abstract
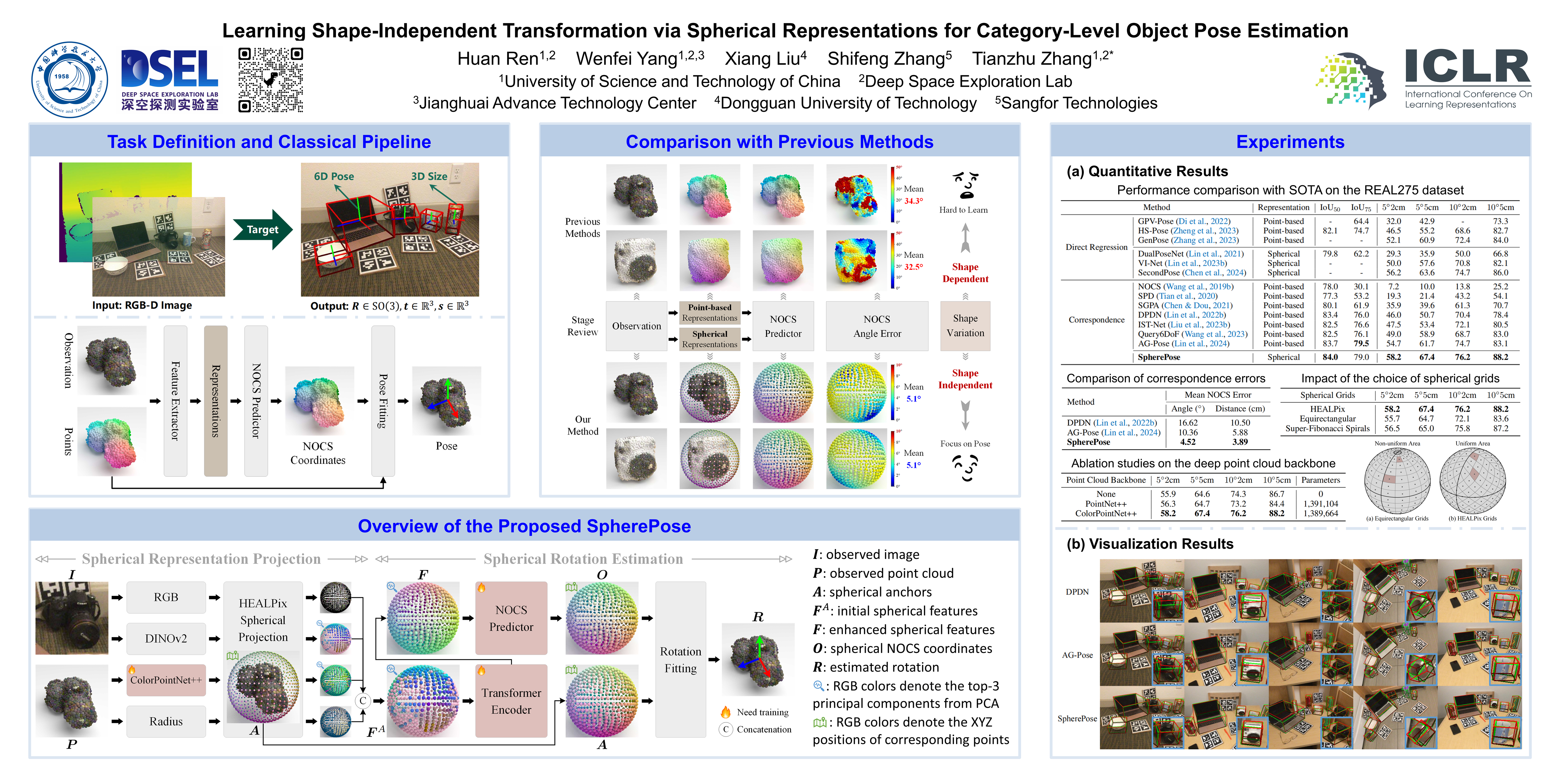
Category-level object pose estimation aims to determine the pose and size of novel objects in specific categories. Existing correspondence-based approaches typically adopt point-based representations to establish the correspondences between primitive observed points and normalized object coordinates. However, due to the inherent shape-dependence of canonical coordinates, these methods suffer from semantic incoherence across diverse object shapes. To resolve this issue, we innovatively leverage the sphere as a shared proxy shape of objects to learn shape-independent transformation via spherical representations. Based on this insight, we introduce a novel architecture called SpherePose, which yields precise correspondence prediction through three core designs. Firstly, We endow the point-wise feature extraction with SO(3)-invariance, which facilitates robust mapping between camera coordinate space and object coordinate space regardless of rotation transformation. Secondly, the spherical attention mechanism is designed to propagate and integrate features among spherical anchors from a comprehensive perspective, thus mitigating the interference of noise and incomplete point cloud. Lastly, a hyperbolic correspondence loss function is designed to distinguish subtle distinctions, which can promote the precision of correspondence prediction. Experimental results on CAMERA25, REAL275 and HouseCat6D benchmarks demonstrate the superior performance of our method, verifying the effectiveness of spherical representations and architectural innovations.