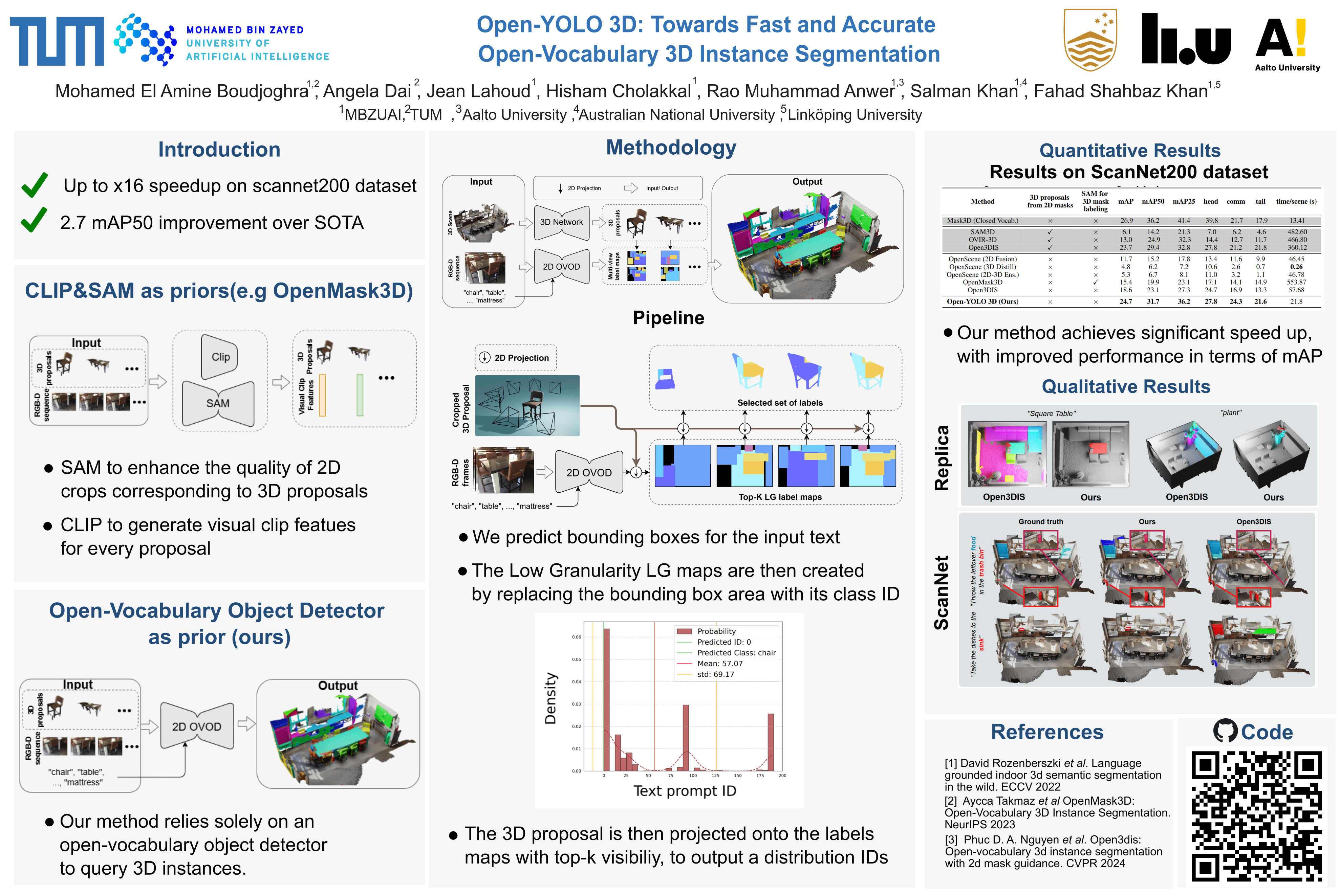
Open-YOLO 3D: Towards Fast and Accurate Open-Vocabulary 3D Instance Segmentation
Mohamed el amine Boudjoghra ⋅ Angela Dai ⋅ Jean Lahoud ⋅ Hisham Cholakkal ⋅ Rao Anwer ⋅ Salman Khan ⋅ Fahad Khan
2025 Poster
{kind=link}
Abstract
Recent works on open-vocabulary 3D instance segmentation show strong promise but at the cost of slow inference speed and high computation requirements. This high computation cost is typically due to their heavy reliance on aggregated clip features from multi-view, which require computationally expensive 2D foundation models like Segment Anything (SAM) and CLIP. Consequently, this hampers their applicability in many real-world applications that require both fast and accurate predictions. To this end, we propose a novel open-vocabulary 3D instance segmentation approach, named Open-YOLO 3D, that efficiently leverages only 2D object detection from multi-view RGB images for open-vocabulary 3D instance segmentation. We demonstrate that our proposed Multi-View Prompt Distribution (MVPDist) method makes use of multi-view information to account for misclassification from the object detector to predict a reliable label for 3D instance masks. Furthermore, since projections of 3D object instances are already contained within the 2D bounding boxes, we show that our proposed low granularity label maps, which require only a 2D object detector to construct, are sufficient and very fast to predict prompt IDs for 3D instance masks when used with our proposed MVPDist. We validate our Open-YOLO 3D on two benchmarks, ScanNet200 and Replica, under two scenarios: (i) with ground truth masks, where labels are required for given object proposals, and (ii) with class-agnostic 3D proposals generated from a 3D proposal network. Our Open-YOLO 3D achieves state-of-the-art performance on both datasets while obtaining up to $\sim$16$\times$ speedup compared to the best existing method in literature. On ScanNet200 val. set, our Open-YOLO 3D achieves mean average precision (mAP) of 24.7% while operating at 22 seconds per scene. github.com/aminebdj/OpenYOLO3D
Video
Chat is not available.
Successful Page Load