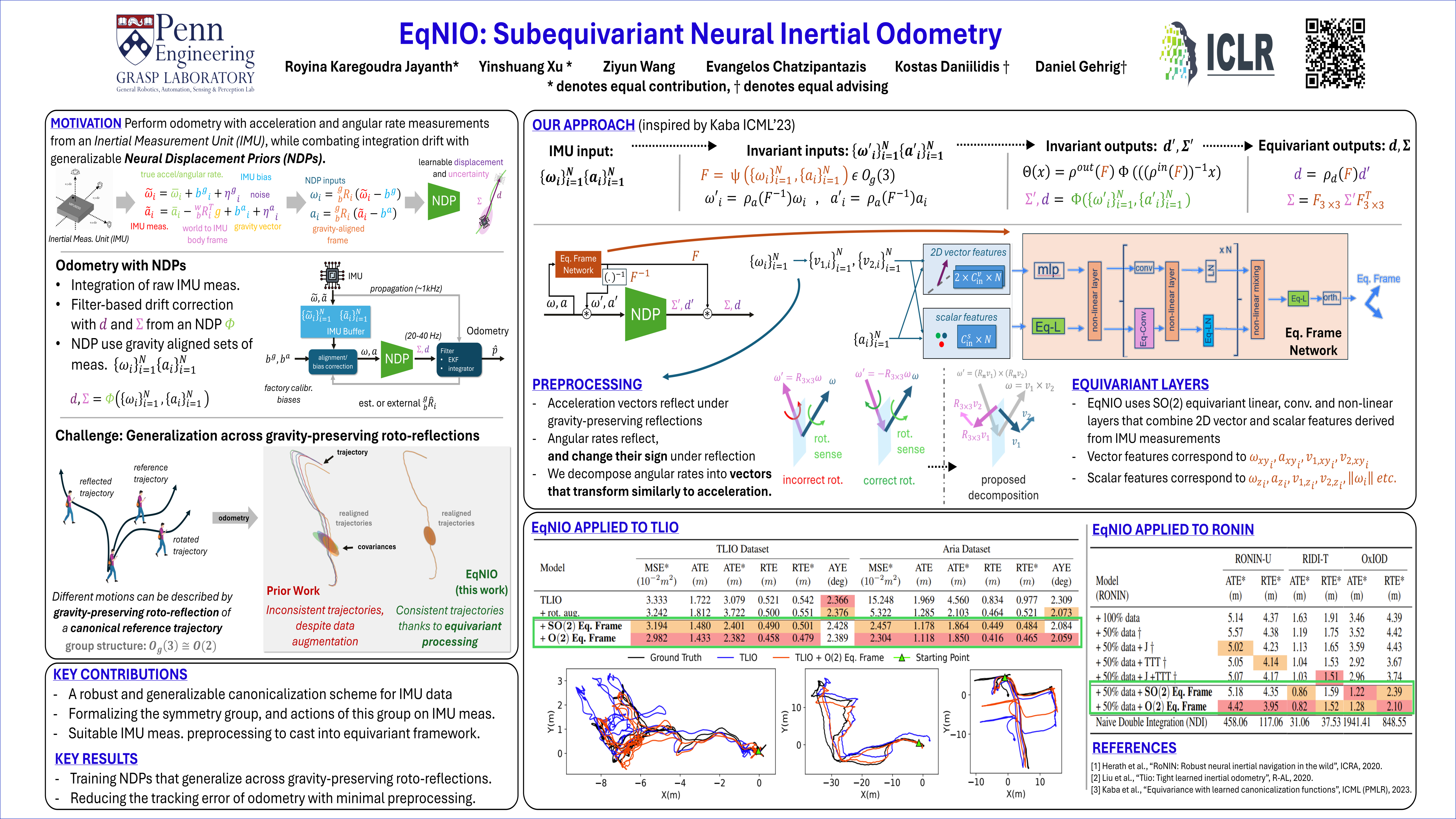
EqNIO: Subequivariant Neural Inertial Odometry
Royina Karegoudra Jayanth ⋅ Yinshuang Xu ⋅ Ziyun Wang ⋅ Evangelos Chatzipantazis ⋅ Kostas Daniilidis ⋅ Daniel Gehrig
2025 Poster
{kind=link}
Abstract
Neural network-based odometry using accelerometer and gyroscope readings from a single IMU can achieve robust, and low-drift localization capabilities, through the use of _neural displacement priors (NDPs)_. These priors learn to produce denoised displacement measurements but need to ignore data variations due to specific IMU mount orientation and motion directions, hindering generalization.This work introduces EqNIO, which addresses this challenge with _canonical displacement priors_, i.e., priors that are invariant to the orientation of the gravity-aligned frame in which the IMU data is expressed. We train such priors on IMU measurements, that are mapped into a learnable canonical frame, which is uniquely defined via three axes: the first is gravity, making the frame gravity aligned, while the second and third are predicted from IMU data. The outputs (displacement and covariance) are mapped back to the original gravity-aligned frame. To maximize generalization, we find that these learnable frames must transform equivariantly with global gravity-preserving roto-reflections from the subgroup $O_g(3)\subset O(3)$, acting on the trajectory, rendering the NDP $O(3)$-_subequivariant_. We tailor specific linear, convolutional, and non-linear layers that commute with the actions of the group. Moreover, we introduce a bijective decomposition of angular rates into vectors that transform similarly to accelerations, allowing us to leverage both measurement types. Natively, angular rates would need to be inverted upon reflection, unlike acceleration, which hinders their joint processing. We highlight EqNIO's flexibility and generalization capabilities by applying it to both filter-based (TLIO), and end-to-end (RONIN) architectures, and outperforming existing methods that use _soft equivariance from auxiliary losses or data augmentation on various datasets. We believe this work paves the way for low-drift and generalizable neural inertial odometry on edge devices. The project details and code can be found at [https://github.com/RoyinaJayanth/EqNIO](https://github.com/RoyinaJayanth/EqNIO).
Video
Chat is not available.
Successful Page Load