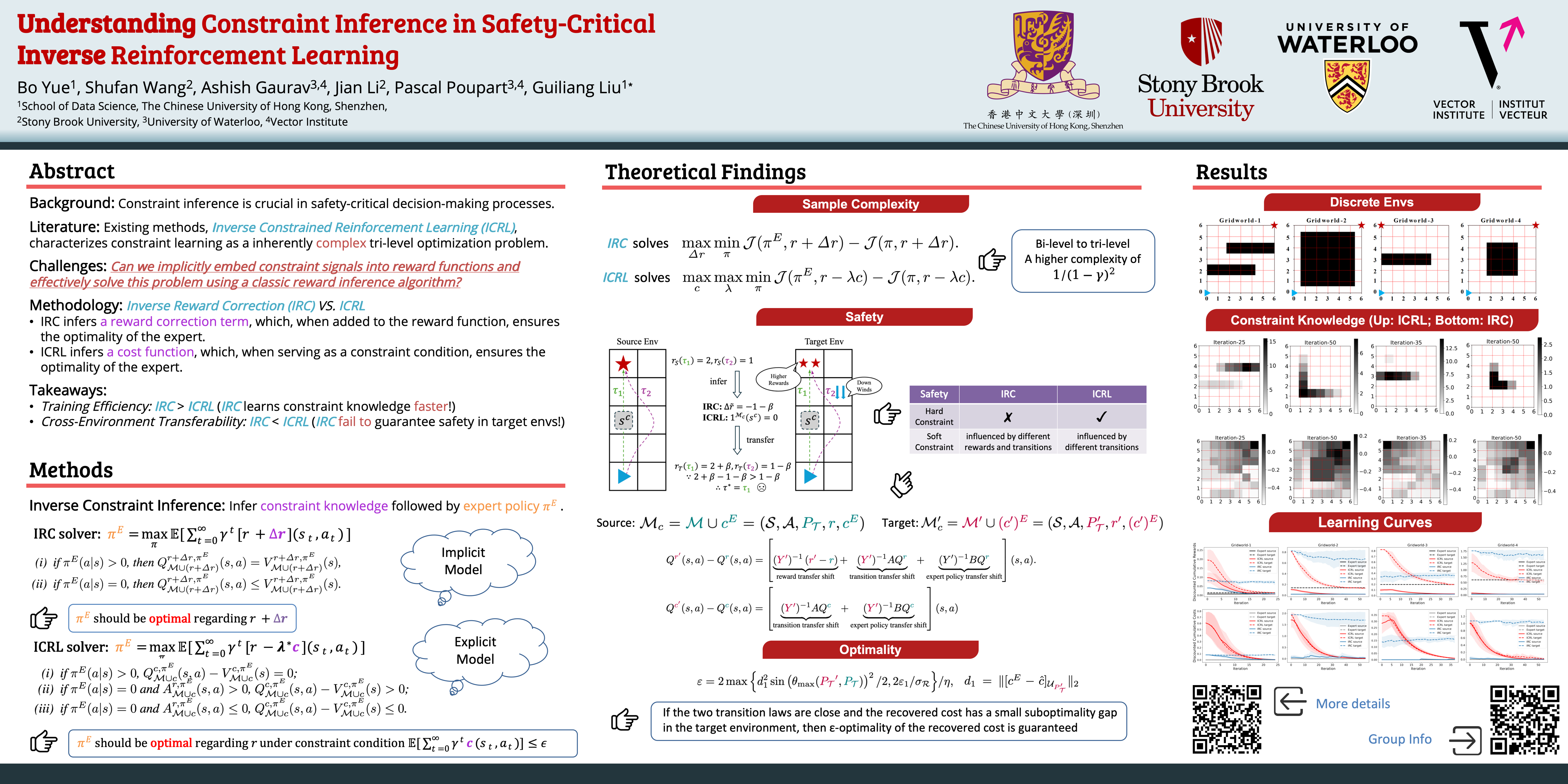
Understanding Constraint Inference in Safety-Critical Inverse Reinforcement Learning
Bo Yue ⋅ Shufan Wang ⋅ Ashish Gaurav ⋅ Jian Li ⋅ Pascal Poupart ⋅ Guiliang Liu
2025 Poster
{kind=link}
Abstract
In practical applications, the underlying constraint knowledge is often unknown and difficult to specify. To address this issue, recent advances in Inverse Constrained Reinforcement Learning (ICRL) have focused on inferring these constraints from expert demonstrations. However, the ICRL approach typically characterizes constraint learning as a tri-level optimization problem, which is inherently complex due to its interdependent variables and multiple layers of optimization.Considering these challenges, a critical question arises: *Can we implicitly embed constraint signals into reward functions and effectively solve this problem using a classic reward inference algorithm?* The resulting method, known as Inverse Reward Correction (IRC), merits investigation. In this work, we conduct a theoretical analysis comparing the sample complexities of both solvers. Our findings confirm that the IRC solver achieves lower sample complexity than its ICRL counterpart.Nevertheless, this reduction in complexity comes at the expense of generalizability. Specifically, in the target environment, the reward correction terms may fail to guarantee the safety of the resulting policy, whereas this issue can be effectively mitigated by transferring the constraints via the ICRL solver. Advancing our inquiry, we investigate conditions under which the ICRL solver ensures $\epsilon$-optimality when transferring to new environments. Empirical results across various environments validate our theoretical findings, underscoring the nuanced trade-offs between complexity reduction and generalizability in safety-critical applications.
Video
Chat is not available.
Successful Page Load