Direct Post-Training Preference Alignment for Multi-Agent Motion Generation Model Using Implicit Feedback from Pre-training Demonstrations
{kind=link}
Abstract
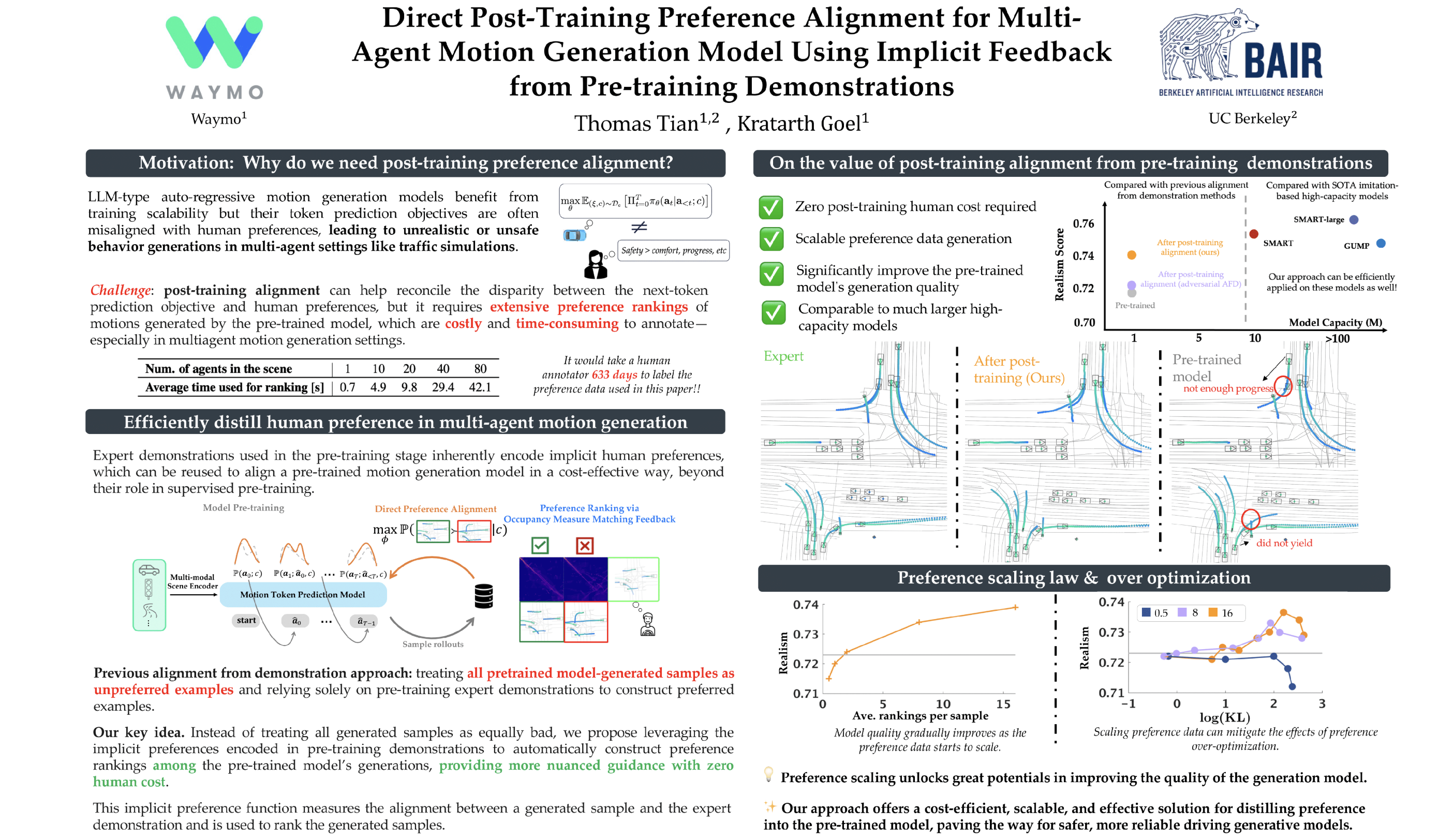
Recent advancements in Large Language Models (LLMs) have revolutionized motion generation models in embodied applications such as autonomous driving and robotic manipulation. While LLM-type auto-regressive motion generation models benefit from training scalability, there remains a discrepancy between their token prediction objectives and human preferences. As a result, models pre-trained solely with token-prediction objectives often generate behaviors that deviate from what humans would prefer, making post-training preference alignment crucial for producing human-preferred motions. Unfortunately, post-training alignment requires extensive preference rankings of motions generated by the pre-trained model, which are costly and time-consuming to annotate, especially in multi-agent motion generation settings. Recently, there has been growing interest in leveraging expert demonstrations previously used during pre-training to scalably generate preference data for post-training alignment. However, these methods often adopt an adversarial assumption, treating all pre-trained model-generated samples as unpreferred examples and relying solely on pre-training expert demonstrations to construct preferred examples. This adversarial approach overlooks the valuable signal provided by preference rankings among the model's own generations, ultimately reducing alignment effectiveness and potentially leading to misaligned behaviors. In this work, instead of treating all generated samples as equally bad, we propose a principled approach that leverages implicit preferences encoded in pre-training expert demonstrations to construct preference rankings among the pre-trained model's generations, offering more nuanced preference alignment guidance with zero human cost. We apply our approach to large-scale traffic simulation (more than 100 agents) and demonstrate its effectiveness in improving the realism of pre-trained model's generated behaviors, making a lightweight 1M motion generation model comparable to state-of-the-art large imitation-based models by relying solely on implicit feedback from pre-training demonstrations, without requiring additional post-training human preference annotations or incurring high computational costs. Furthermore, we provide an in-depth analysis of preference data scaling laws and their effects on over-optimization, offering valuable insights for future studies.