GenEx: Generating an Explorable World
{kind=link}
Abstract
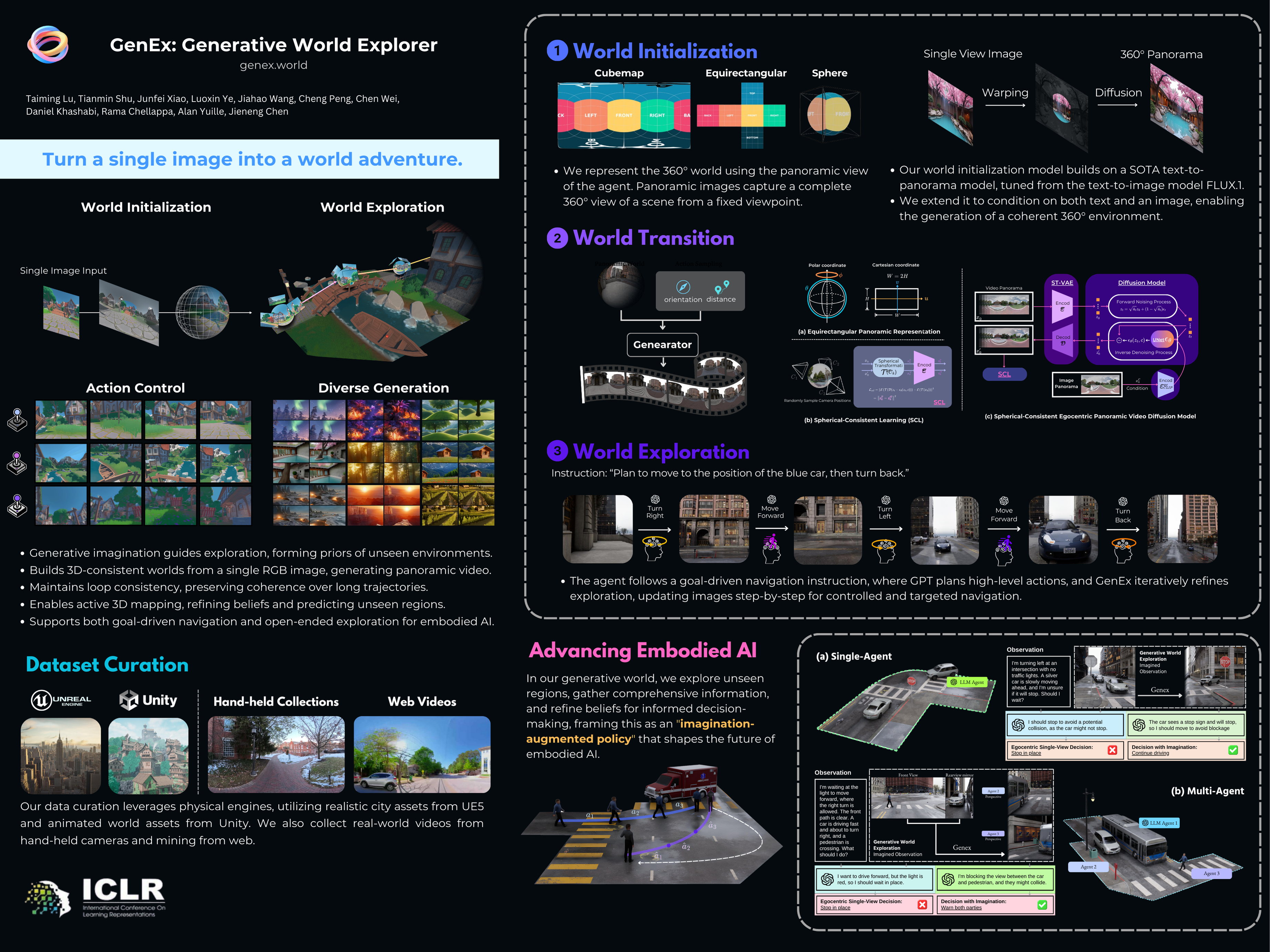
Understanding, navigating, and exploring the 3D physical real world has long been a central challenge in the development of artificial intelligence. In this work, we take a step toward this goal by introducing GenEx, a system capable of planning complex embodied world exploration, guided by its generative imagination that forms expectations about the surrounding environments. GenEx generates high-quality, continuous 360-degree virtual environments, achieving robust loop consistency and active 3D mapping over extended trajectories. Leveraging generative imagination, GPT-assisted agents can undertake complex embodied tasks, including goal-agnostic exploration and goal-driven navigation. Agents utilize imagined observations to update their beliefs, simulate potential outcomes, and enhance their decision-making. Training on the synthetic urban dataset GenEx-DB and evaluation on GenEx-EQA demonstrate that our approach significantly improves agents' planning capabilities, providing a transformative platform toward intelligent, imaginative embodied exploration.