STAMP: Scalable Task- And Model-agnostic Collaborative Perception
{kind=link}
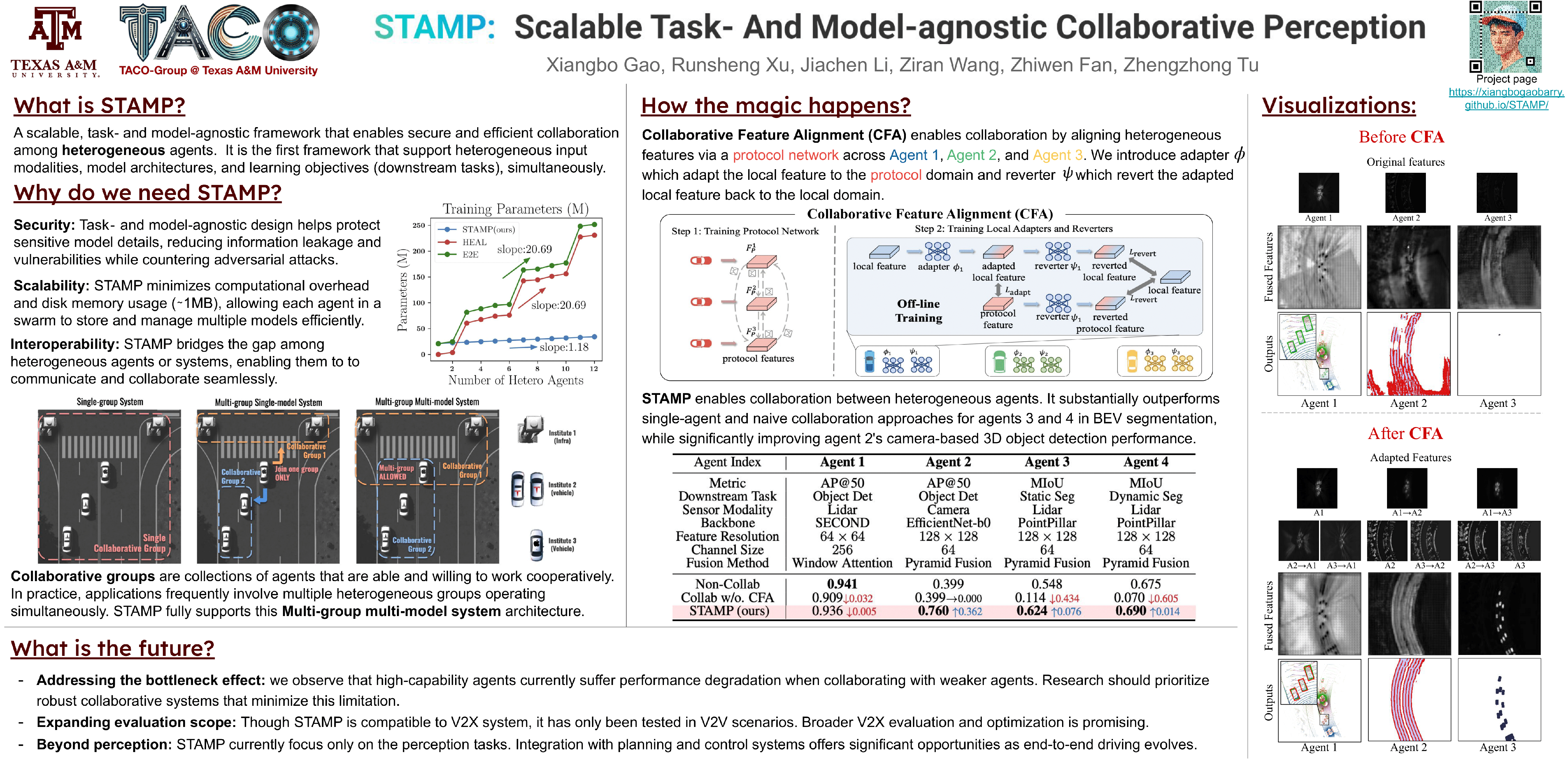
Abstract
Perception is a crucial component of autonomous driving systems. However, single-agent setups often face limitations due to sensor constraints, especially under challenging conditions like severe occlusion, adverse weather, and long-range object detection. Multi-agent collaborative perception (CP) offers a promising solution that enables communication and information sharing between connected vehicles. Yet, the heterogeneity among agents—in terms of sensors, models, and tasks—significantly hinders effective and efficient cross-agent collaboration. To address these challenges, we propose STAMP, a scalable task- and model-agnostic collaborative perception framework tailored for heterogeneous agents. STAMP utilizes lightweight adapter-reverter pairs to transform Bird's Eye View (BEV) features between agent-specific domains and a shared protocol domain, facilitating efficient feature sharing and fusion while minimizing computational overhead. Moreover, our approach enhances scalability, preserves model security, and accommodates a diverse range of agents. Extensive experiments on both simulated (OPV2V) and real-world (V2V4Real) datasets demonstrate that STAMP achieves comparable or superior accuracy to state-of-the-art models with significantly reduced computational costs. As the first-of-its-kind task- and model-agnostic collaborative perception framework, STAMP aims to advance research in scalable and secure mobility systems, bringing us closer to Level 5 autonomy. Our project page is at https://xiangbogaobarry.github.io/STAMP and the code is available at https://github.com/taco-group/STAMP.