LASeR: Towards Diversified and Generalizable Robot Design with Large Language Models
{kind=link}
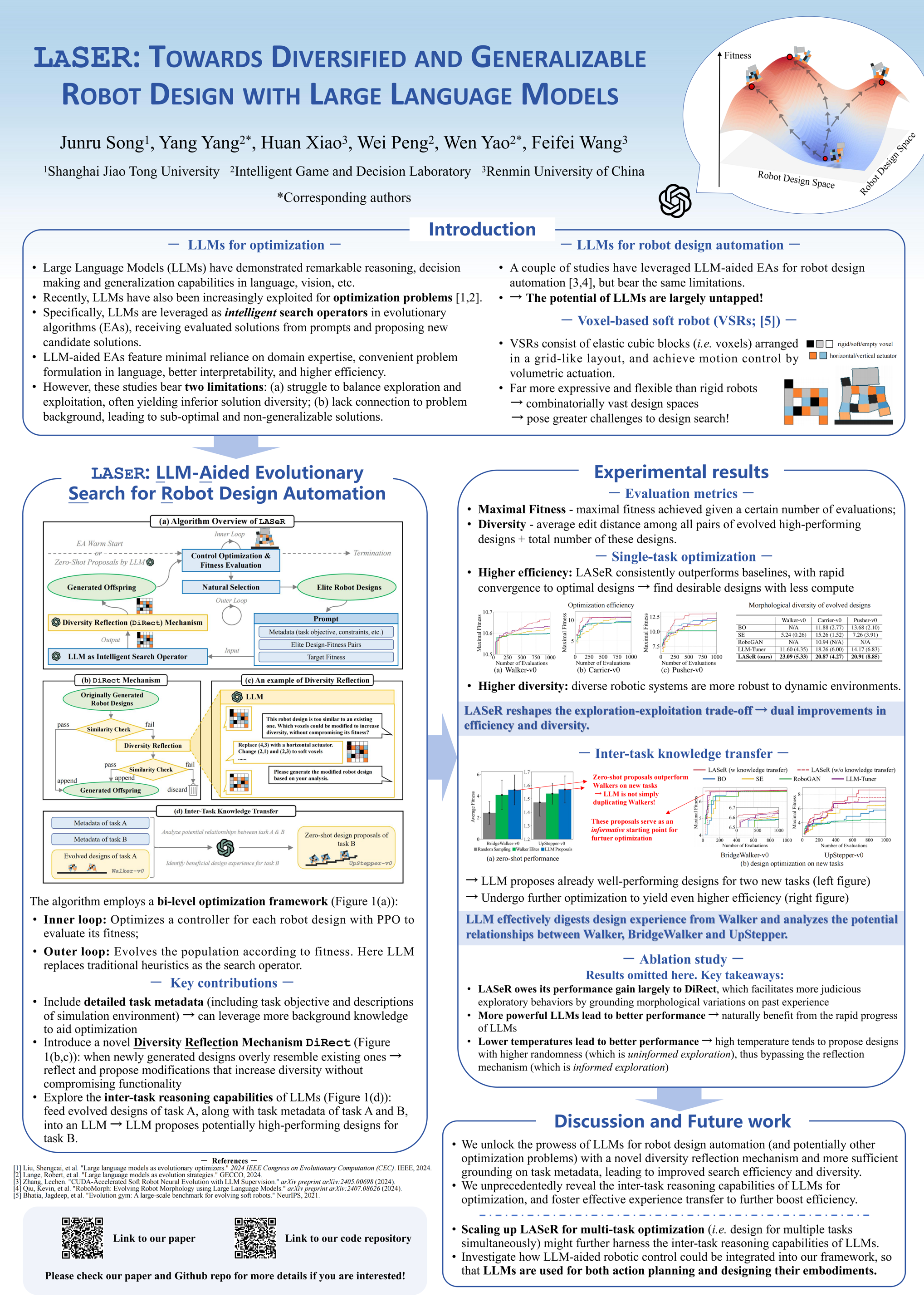
Abstract
Recent advances in Large Language Models (LLMs) have stimulated a significant paradigm shift in evolutionary optimization, where hand-crafted search heuristics are gradually replaced with LLMs serving as intelligent search operators. However, these studies still bear some notable limitations, including a challenge to balance exploitation with exploration, often leading to inferior solution diversity, as well as poor generalizability of problem solving across different task settings. These unsolved issues render the prowess of LLMs in robot design automation largely untapped. In this work, we present LASeR -- Large Language Model-Aided Evolutionary Search for Robot Design Automation. Leveraging a novel reflection mechanism termed DiRect, we elicit more knowledgeable exploratory behaviors from LLMs based on past search trajectories, reshaping the exploration-exploitation tradeoff with dual improvements in optimization efficiency and solution diversity. Additionally, with evolution fully grounded in task-related background information, we unprecedentedly uncover the inter-task reasoning capabilities of LLMs, facilitating generalizable design processes that effectively inspire zero-shot robot proposals for new applications. Our simulated experiments on voxel-based soft robots showcase distinct advantages of LASeR over competitive baselines. Code at https://github.com/WoodySJR/LASeR.