ManiSkill-HAB: A Benchmark for Low-Level Manipulation in Home Rearrangement Tasks
{kind=link}
Abstract
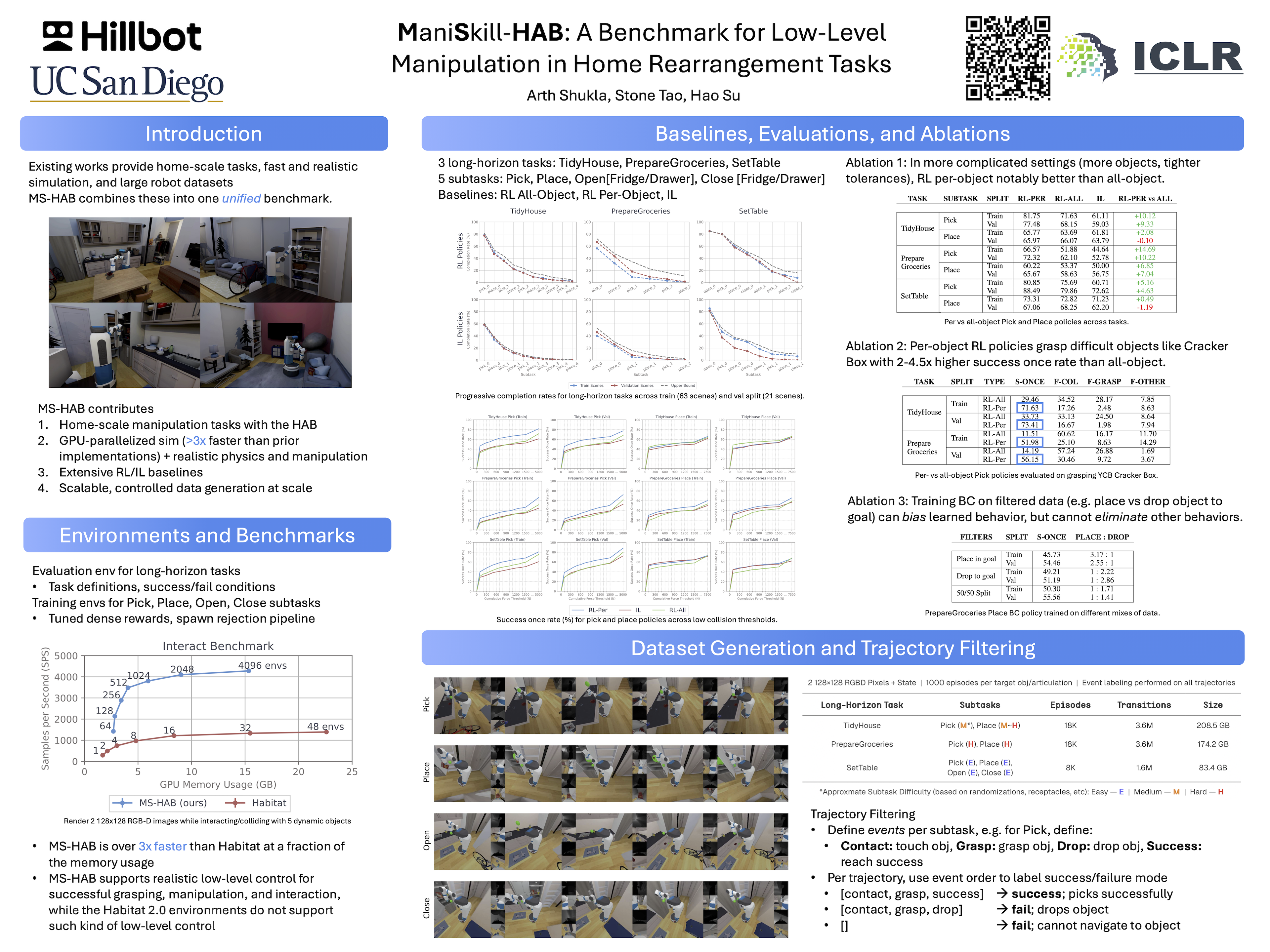
High-quality benchmarks are the foundation for embodied AI research, enabling significant advancements in long-horizon navigation, manipulation and rearrangement tasks. However, as frontier tasks in robotics get more advanced, they require faster simulation speed, more intricate test environments, and larger demonstration datasets. To this end, we present MS-HAB, a holistic benchmark for low-level manipulation and in-home object rearrangement. First, we provide a GPU-accelerated implementation of the Home Assistant Benchmark (HAB). We support realistic low-level control and achieve over 3x the speed of prior magical grasp implementations at a fraction of the GPU memory usage. Second, we train extensive reinforcement learning (RL) and imitation learning (IL) baselines for future work to compare against. Finally, we develop a rule-based trajectory filtering system to sample specific demonstrations from our RL policies which match predefined criteria for robot behavior and safety. Combining demonstration filtering with our fast environments enables efficient, controlled data generation at scale.