High-dimension Prototype is a Better Incremental Object Detection Learner
{kind=link}
Abstract
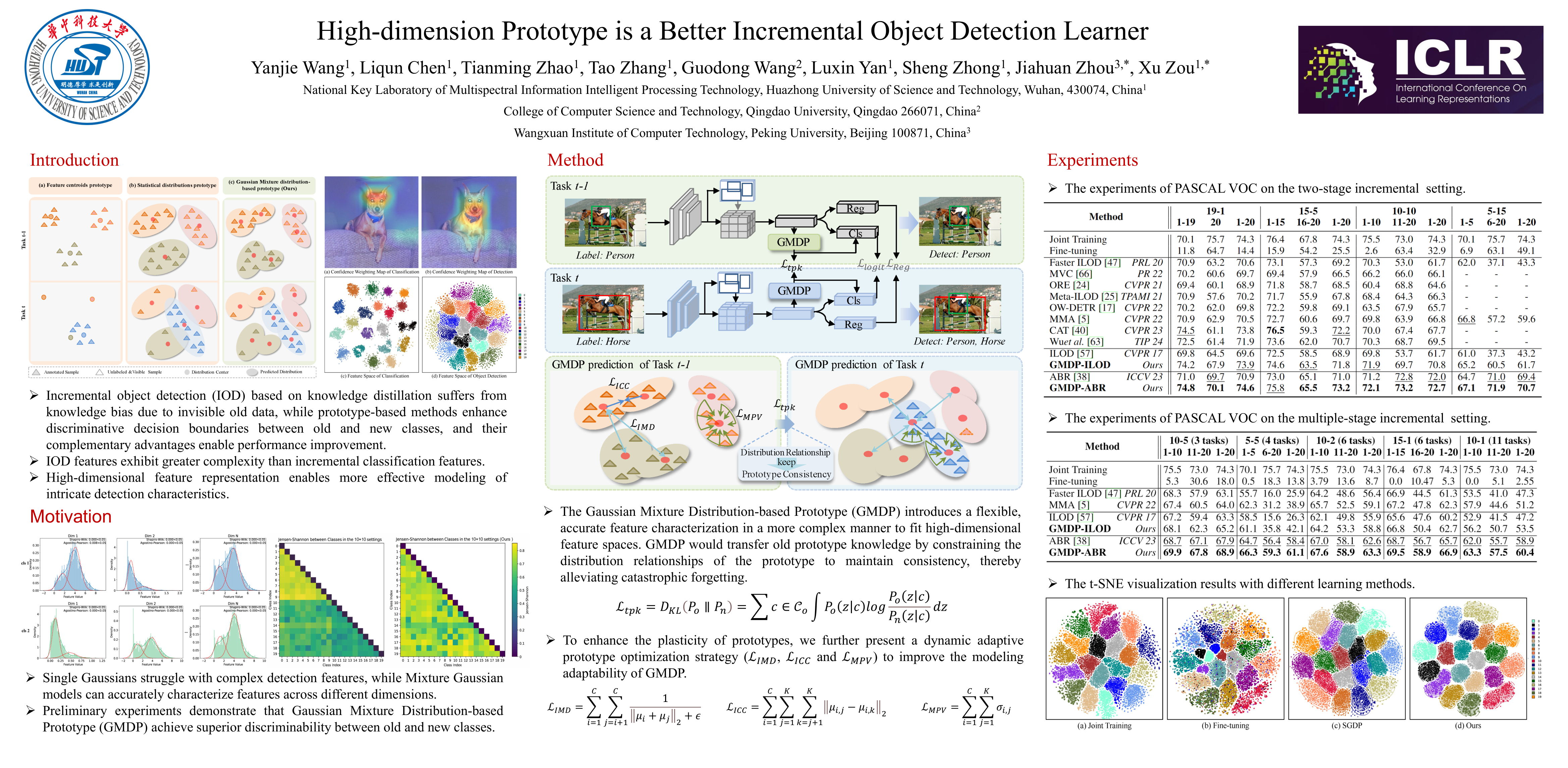
Incremental object detection (IOD), surpassing simple classification, requires the simultaneous overcoming of catastrophic forgetting in both recognition and localization tasks, primarily due to the significantly higher feature space complexity. Integrating Knowledge Distillation (KD) would mitigate the occurrence of catastrophic forgetting. However, the challenge of knowledge shift caused by invisible previous task data hampers existing KD-based methods, leading to limited improvements in IOD performance. This paper aims to alleviate knowledge shift by enhancing the accuracy and granularity in describing complex high-dimensional feature spaces. To this end, we put forth a novel higher-dimension-prototype learning approach for KD-based IOD, enabling a more flexible, accurate, and fine-grained representation of feature distributions without the need to retain any previous task data. Existing prototype learning methods calculate feature centroids or statistical Gaussian distributions as prototypes, disregarding actual irregular distribution information or leading to inter-class feature overlap, which is not directly applicable to the more difficult task of IOD with complex feature space. To address the above issue, we propose a Gaussian Mixture Distribution-based Prototype (GMDP), which explicitly models the distribution relationships of different classes by directly measuring the likelihood of embedding from new and old models into class distribution prototypes in a higher dimension manner. Specifically, GMDP dynamically adapts the component weights and corresponding means/variances of class distribution prototypes to represent both intra-class and inter-class variability more accurately. Progressing into a new task, GMDP constrains the distance between the distribution of new and previous task classes, minimizing overlap with existing classes and thus striking a balance between stability and adaptability. GMDP can be readily integrated into existing IOD methods to enhance performance further. Extensive experiments on the PASCAL VOC and MS-COCO show that our method consistently exceeds four baselines by a large margin and significantly outperforms other SOTA results under various settings.