Learning Task Belief Similarity with Latent Dynamics for Meta-Reinforcement Learning
{kind=link}
Abstract
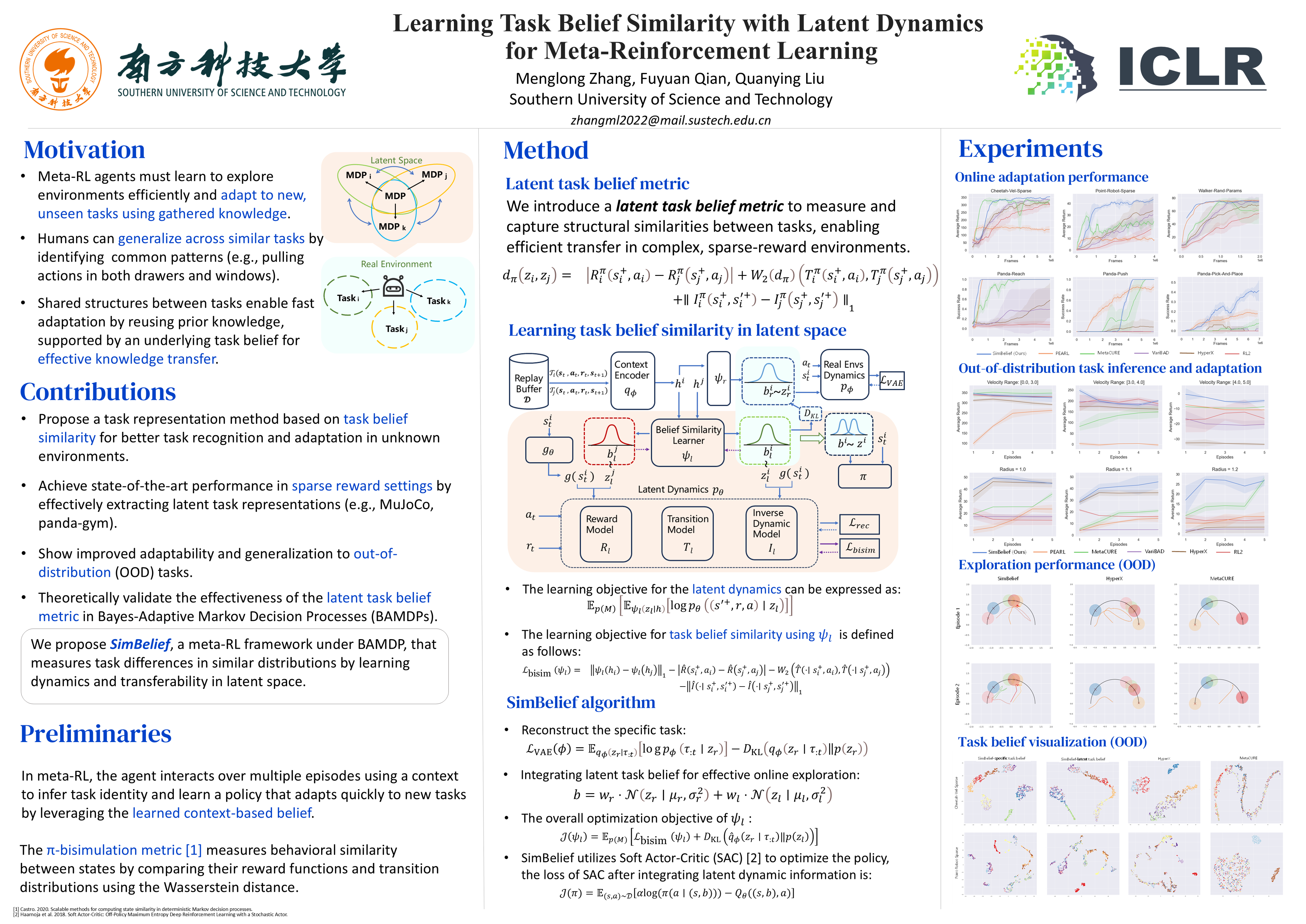
Meta-reinforcement learning requires utilizing prior task distribution information obtained during exploration to rapidly adapt to unknown tasks. The efficiency of an agent's exploration hinges on accurately identifying the current task. Recent Bayes-Adaptive Deep RL approaches often rely on reconstructing the environment's reward signal, which is challenging in sparse reward settings, leading to suboptimal exploitation. Inspired by bisimulation metrics, which robustly extracts behavioral similarity in continuous MDPs, we propose SimBelief—a novel meta-RL framework via measuring similarity of task belief in Bayes-Adaptive MDP (BAMDP). SimBelief effectively extracts common features of similar task distributions, enabling efficient task identification and exploration in sparse reward environments. We introduce latent task belief metric to learn the common structure of similar tasks and incorporate it into the real task belief. By learning the latent dynamics across task distributions, we connect shared latent task belief features with specific task features, facilitating rapid task identification and adaptation. Our method outperforms state-of-the-art baselines on sparse reward MuJoCo and panda-gym tasks.