Point Cluster: A Compact Message Unit for Communication-Efficient Collaborative Perception
{kind=link}
Abstract
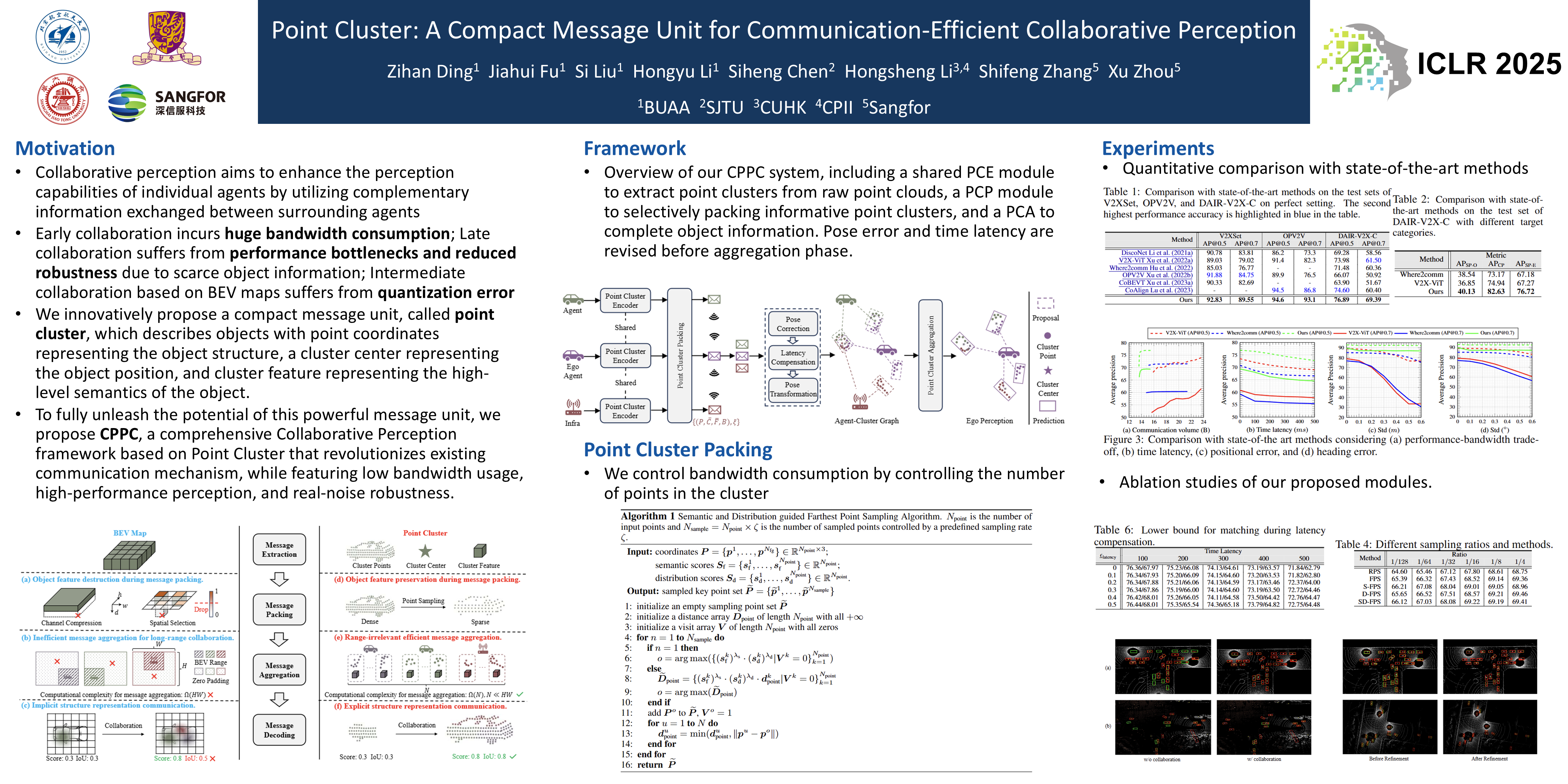
The objective of the collaborative perception task is to enhance the individual agent's perception capability through message communication among neighboring agents. A central challenge lies in optimizing the inherent trade-off between perception ability and communication cost. To tackle this bottleneck issue, we argue that a good message unit should encapsulate both semantic and structural information in a sparse format, a feature not present in prior approaches. In this paper, we innovatively propose a compact message unit, namely point cluster, whose core idea is to represent potential objects efficiently with explicitly decoupled low-level structure information and high-level semantic information. Building upon this new message unit, we propose a comprehensive framework CPPC for communication-efficient collaborative perception. The core principle of CPPC is twofold: first, through strategical point sampling, structure information can be well preserved with a few key points, which can significantly reduce communication cost; second, the sequence format of point clusters enables efficient message aggregation by set matching and merging, thereby eliminating unnecessary computation generated when aligning squared BEV maps, especially for long-range collaboration. To handle time latency and pose errors encountered in real-world scenarios, we also carefully design parameter-free solutions that can adapt to different noisy levels without finetuning. Experiments on two widely recognized collaborative perception benchmarks showcase the superior performance of our method compared to the previous state-of-the-art approaches.