Accelerating Goal-Conditioned Reinforcement Learning Algorithms and Research
Michał Bortkiewicz ⋅ Władysław Pałucki ⋅ Vivek Myers ⋅ Tadeusz Dziarmaga ⋅ Tomasz Arczewski ⋅ Łukasz Kuciński ⋅ Benjamin Eysenbach
2025 Poster
{kind=link}
Abstract
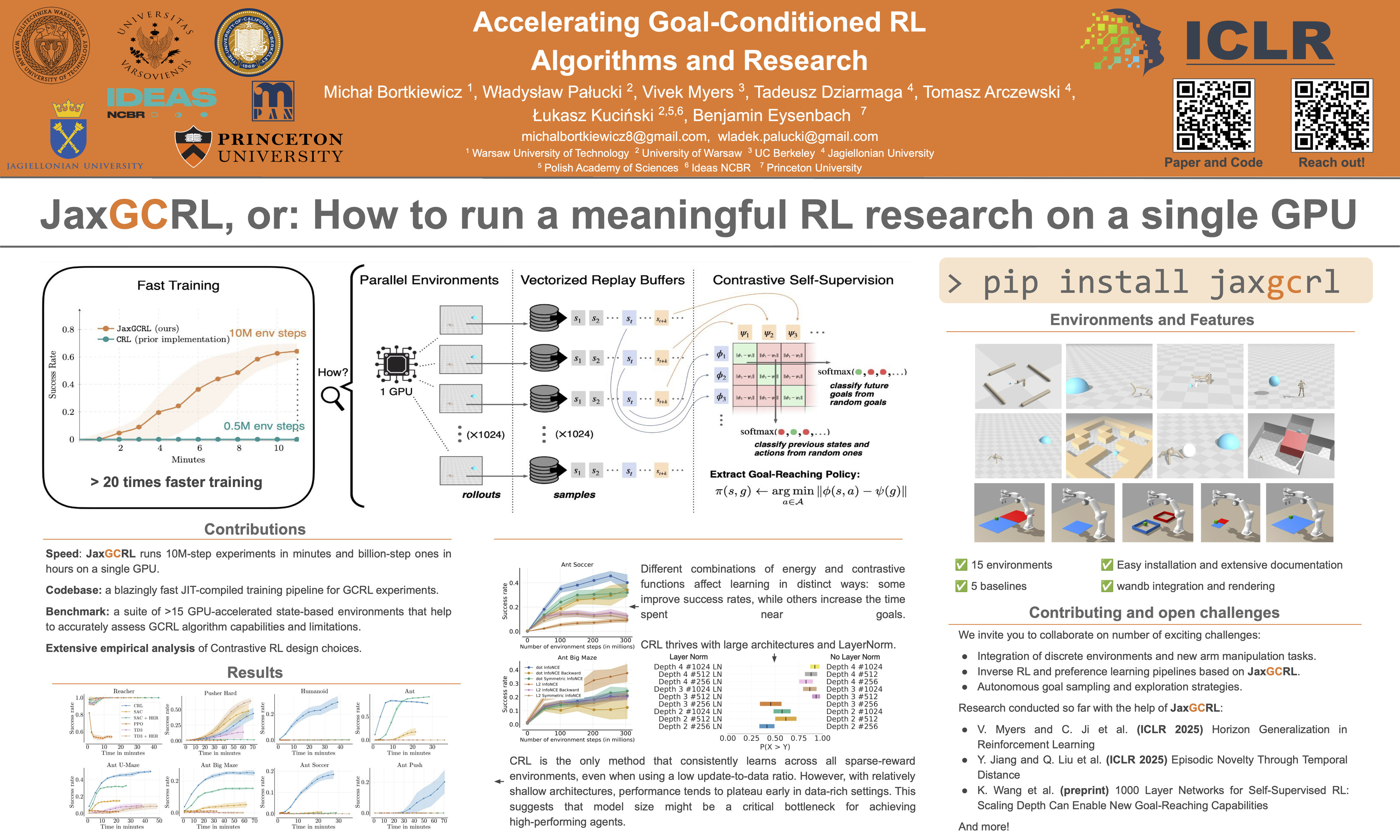
Self-supervision has the potential to transform reinforcement learning (RL), paralleling the breakthroughs it has enabled in other areas of machine learning. While self-supervised learning in other domains aims to find patterns in a fixed dataset, self-supervised goal-conditioned reinforcement learning (GCRL) agents discover *new* behaviors by learning from the goals achieved during unstructured interaction with the environment. However, these methods have failed to see similar success, both due to a lack of data from slow environment simulations as well as a lack of stable algorithms. We take a step toward addressing both of these issues by releasing a high-performance codebase and benchmark (`JaxGCRL`) for self-supervised GCRL, enabling researchers to train agents for millions of environment steps in minutes on a single GPU. By utilizing GPU-accelerated replay buffers, environments, and a stable contrastive RL algorithm, we reduce training time by up to $22\times$. Additionally, we assess key design choices in contrastive RL, identifying those that most effectively stabilize and enhance training performance. With this approach, we provide a foundation for future research in self-supervised GCRL, enabling researchers to quickly iterate on new ideas and evaluate them in diverse and challenging environments. Code: [https://anonymous.4open.science/r/JaxGCRL-2316/README.md](https://anonymous.4open.science/r/JaxGCRL-2316/README.md)
Video
Chat is not available.
Successful Page Load