BRAID: Input-driven Nonlinear Dynamical Modeling of Neural-Behavioral Data
{kind=link}
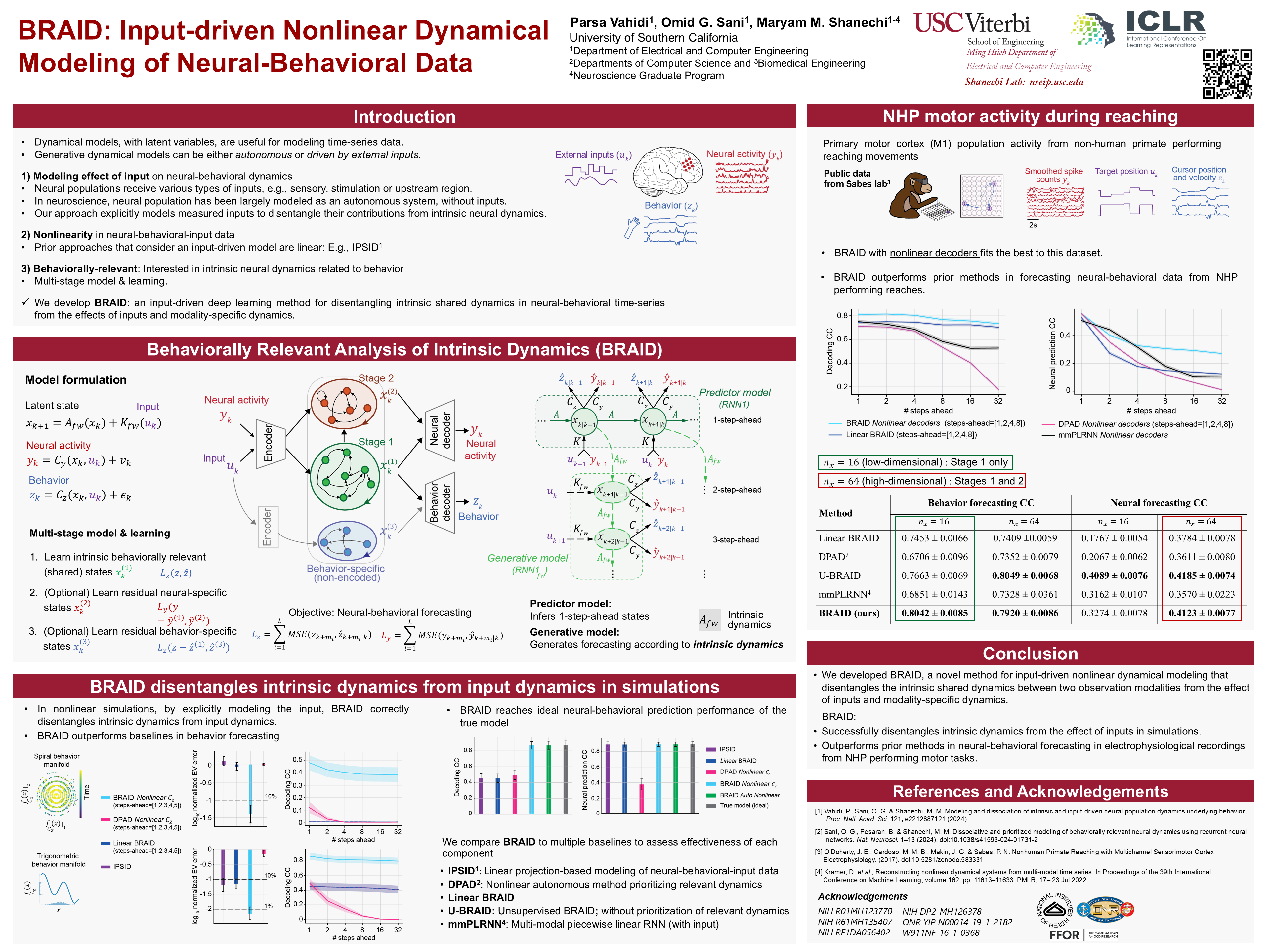
Abstract
Neural populations exhibit complex recurrent structures that drive behavior, while continuously receiving and integrating external inputs from sensory stimuli, upstream regions, and neurostimulation. However, neural populations are often modeled as autonomous dynamical systems, with little consideration given to the influence of external inputs that shape the population activity and behavioral outcomes. Here, we introduce BRAID, a deep learning framework that models nonlinear neural dynamics underlying behavior while explicitly incorporating any measured external inputs. Our method disentangles intrinsic recurrent neural population dynamics from the effects of inputs by including a forecasting objective within input-driven recurrent neural networks. BRAID further prioritizes the learning of intrinsic dynamics that are related to a behavior of interest by using a multi-stage optimization scheme. We validate BRAID with nonlinear simulations, showing that it can accurately learn the intrinsic dynamics shared between neural and behavioral modalities. We then apply BRAID to motor cortical activity recorded during a motor task and demonstrate that our method more accurately fits the neural-behavioral data by incorporating measured sensory stimuli into the model and improves the forecasting of neural-behavioral data compared with various baseline methods, whether input-driven or not.