OmniRe: Omni Urban Scene Reconstruction
{kind=link}
Abstract
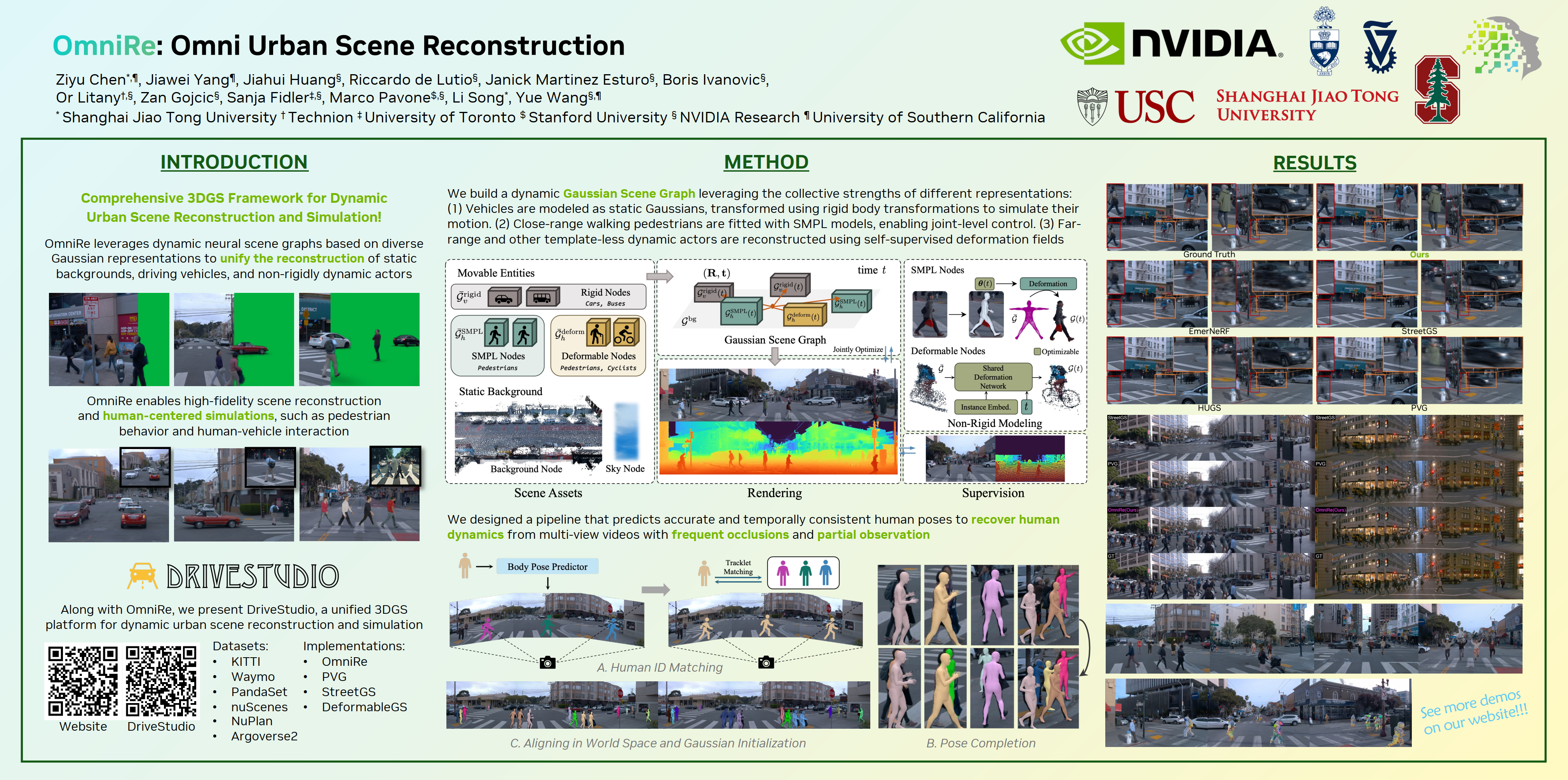
We introduce OmniRe, a comprehensive system for efficiently creating high-fidelity digital twins of dynamic real-world scenes from on-device logs. Recent methods using neural fields or Gaussian Splatting primarily focus on vehicles, hindering a holistic framework for all dynamic foregrounds demanded by downstream applications, e.g., the simulation of human behavior. OmniRe extends beyond vehicle modeling to enable accurate, full-length reconstruction of diverse dynamic objects in urban scenes. Our approach builds scene graphs on 3DGS and constructs multiple Gaussian representations in canonical spaces that model various dynamic actors, including vehicles, pedestrians, cyclists, and others. OmniRe allows holistically reconstructing any dynamic object in the scene, enabling advanced simulations (~60 Hz) that include human-participated scenarios, such as pedestrian behavior simulation and human-vehicle interaction. This comprehensive simulation capability is unmatched by existing methods. Extensive evaluations on the Waymo dataset show that our approach outperforms prior state-of-the-art methods quantitatively and qualitatively by a large margin. We further extend our results to 5 additional popular driving datasets to demonstrate its generalizability on common urban scenes. Code and results are available at omnire.