SoftZoo: A Soft Robot Co-design Benchmark For Locomotion In Diverse Environments
{kind=link}
Abstract
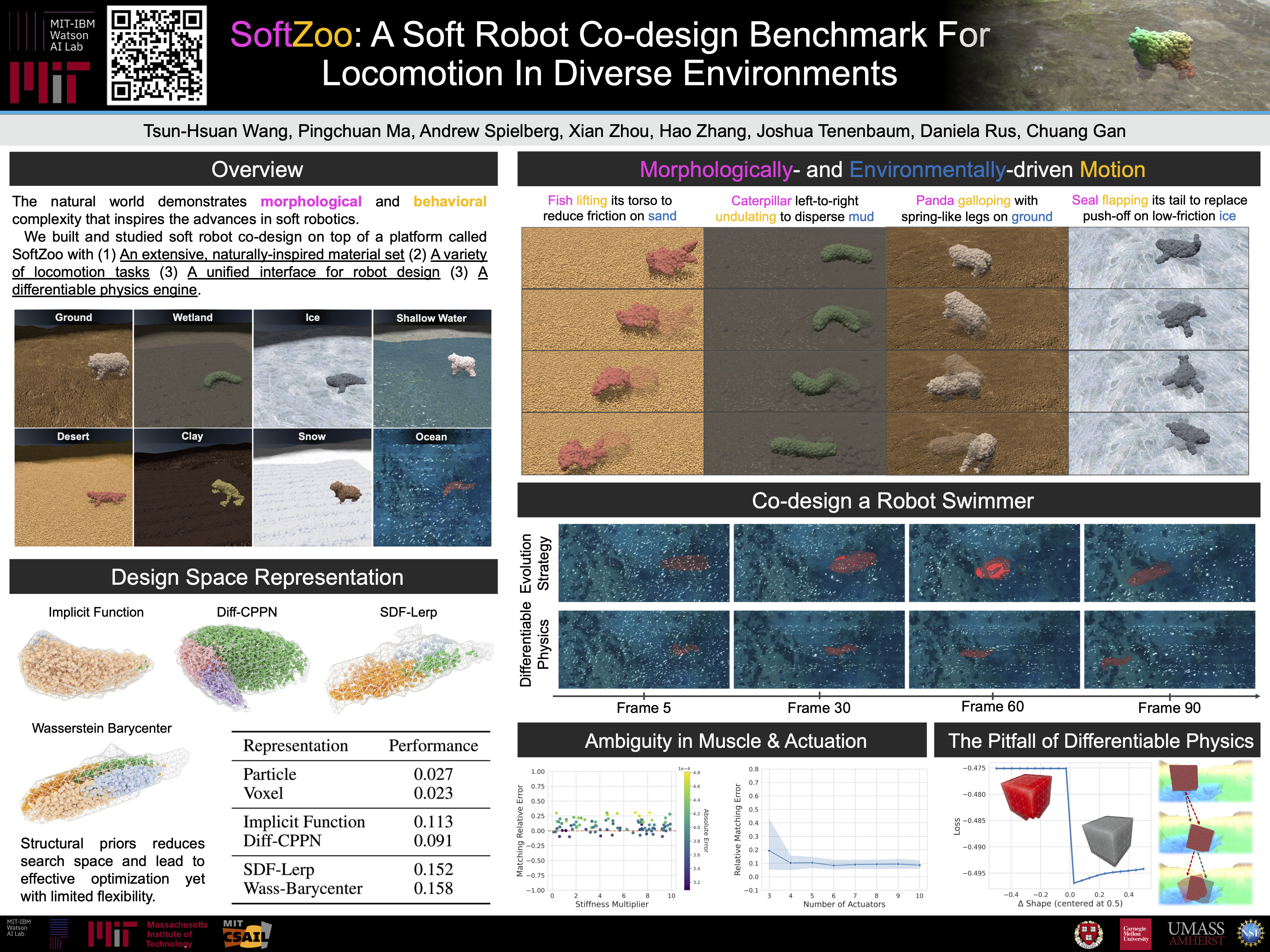
While significant research progress has been made in robot learning for control, unique challenges arise when simultaneously co-optimizing morphology. Existing work has typically been tailored for particular environments or representations. In order to more fully understand inherent design and performance tradeoffs and accelerate the development of new breeds of soft robots, a comprehensive virtual platform — with well-established tasks, environments, and evaluation metrics — is needed. In this work, we introduce SoftZoo, a soft robot co-design platform for locomotion in diverse environments. SoftZoo supports an extensive, naturally-inspired material set, including the ability to simulate environments such as flat ground, desert, wetland, clay, ice, snow, shallow water, and ocean. Further, it provides a variety of tasks relevant for soft robotics, including fast locomotion, agile turning, and path following, as well as differentiable design representations for morphology and control. Combined, these elements form a feature-rich platform for analysis and development of soft robot co-design algorithms. We benchmark prevalent representations and co-design algorithms, and shed light on 1) the interplay between environment, morphology, and behavior (2) the importance of design space representations 3) the ambiguity in muscle formation and controller synthesis and 4) the value of differentiable physics. We envision that SoftZoo will serve as a standard platform and template an approach toward the development of novel representations and algorithms for co-designing soft robots’ behavioral and morphological intelligence. Demos are available on our project page.