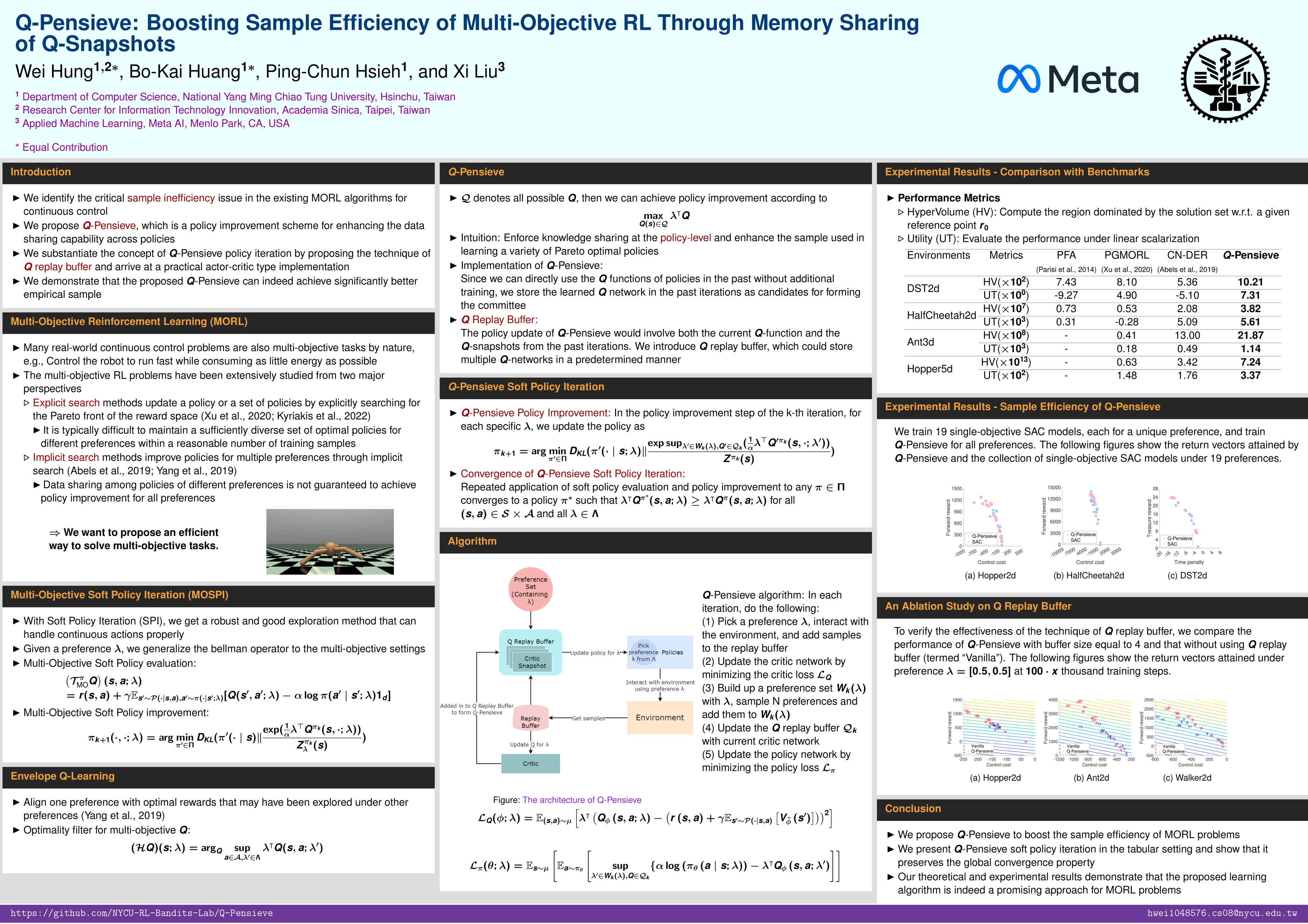
Q-Pensieve: Boosting Sample Efficiency of Multi-Objective RL Through Memory Sharing of Q-Snapshots
Wei Hung ⋅ Bo Kai Huang ⋅ Ping-Chun Hsieh ⋅ Xi Liu
2023 In-Person Poster presentation / poster accept
{kind=link}
Abstract
Many real-world continuous control problems are in the dilemma of weighing the pros and cons, multi-objective reinforcement learning (MORL) serves as a generic framework of learning control policies for different preferences over objectives. However, the existing MORL methods either rely on multiple passes of explicit search for finding the Pareto front and therefore are not sample-efficient, or utilizes a shared policy network for coarse knowledge sharing among policies. To boost the sample efficiency of MORL, we propose $Q$-Pensieve, a policy improvement scheme that stores a collection of $Q$-snapshots to jointly determine the policy update direction and thereby enables data sharing at the policy level. We show that $Q$-Pensieve can be naturally integrated with soft policy iteration with convergence guarantee. To substantiate this concept, we propose the technique of $Q$ replay buffer, which stores the learned $Q$-networks from the past iterations, and arrive at a practical actor-critic implementation. Through extensive experiments and an ablation study, we demonstrate that with much fewer samples, the proposed algorithm can outperform the benchmark MORL methods on a variety of MORL benchmark tasks.
Video
Chat is not available.
Successful Page Load