GOOD: Exploring geometric cues for detecting objects in an open world
{kind=link}
Abstract
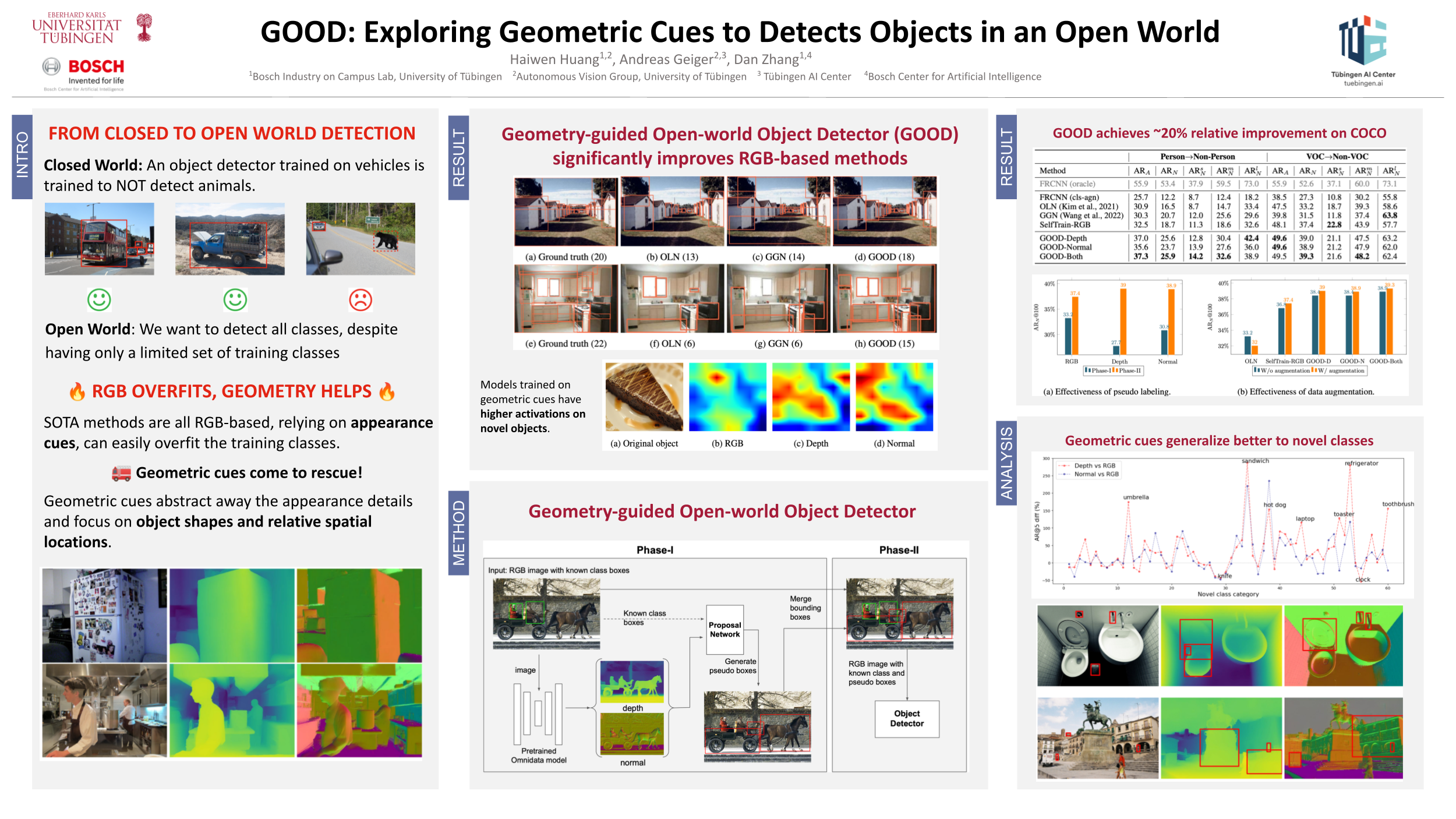
We address the task of open-world class-agnostic object detection, i.e., detecting every object in an image by learning from a limited number of base object classes. State-of-the-art RGB-based models suffer from overfitting the training classes and often fail at detecting novel-looking objects. This is because RGB-based models primarily rely on appearance similarity to detect novel objects and are also prone to overfitting short-cut cues such as textures and discriminative parts. To address these shortcomings of RGB-based object detectors, we propose incorporating geometric cues such as depth and normals, predicted by general-purpose monocular estimators. Specifically, we use the geometric cues to train an object proposal network for pseudo-labeling unannotated novel objects in the training set. Our resulting Geometry-guided Open-world Object Detector (GOOD) significantly improves detection recall for novel object categories and already performs well with only a few training classes. Using a single ``person'' class for training on the COCO dataset, GOOD surpasses SOTA methods by 5.0% AR@100, a relative improvement of 24%. The code has been made available at https://github.com/autonomousvision/good.