Policy Pre-training for Autonomous Driving via Self-supervised Geometric Modeling
{kind=link}
Abstract
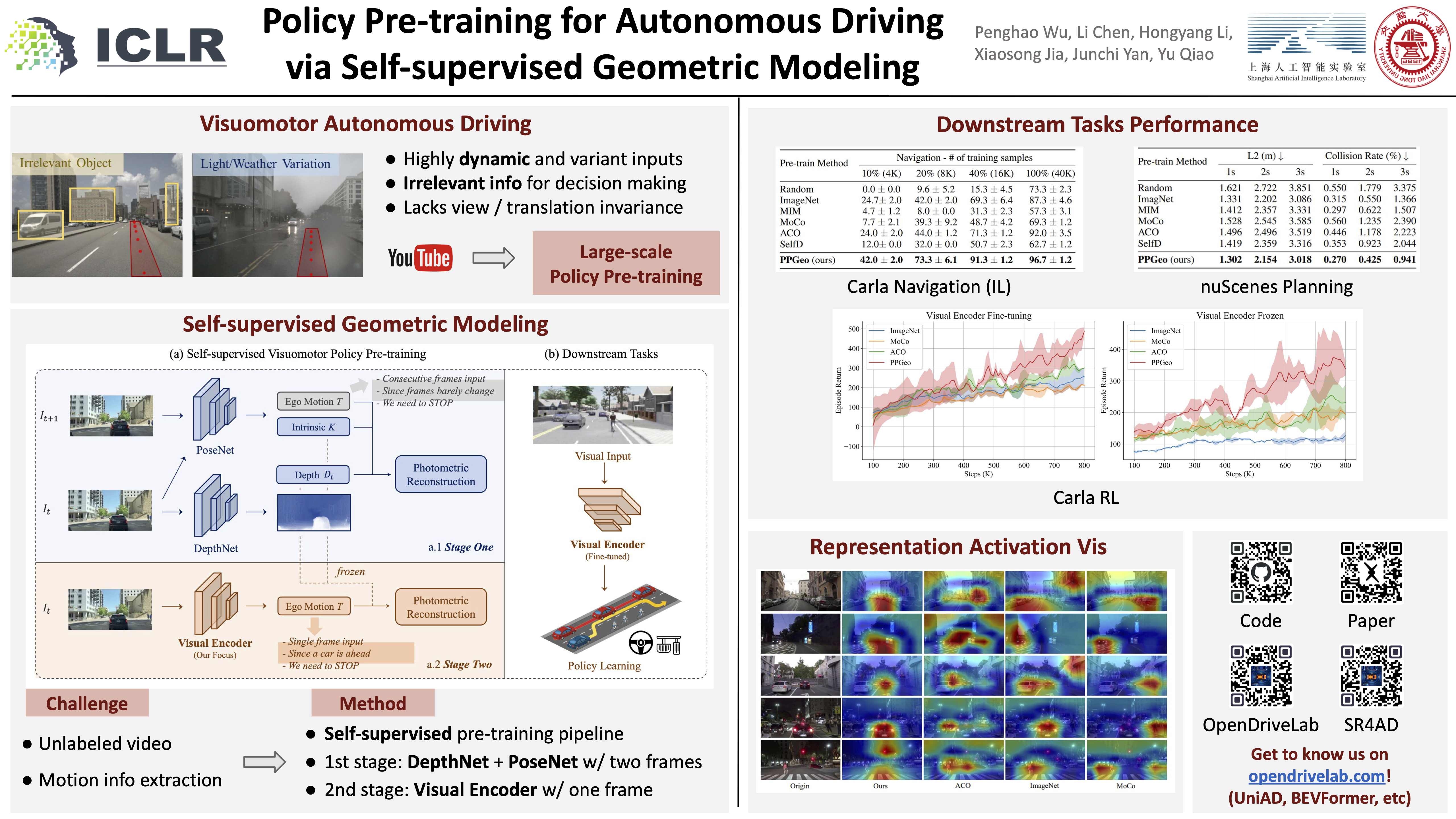
Witnessing the impressive achievements of pre-training techniques on large-scale data in the field of computer vision and natural language processing, we wonder whether this idea could be adapted in a grab-and-go spirit, and mitigate the sample inefficiency problem for visuomotor driving. Given the highly dynamic and variant nature of the input, the visuomotor driving task inherently lacks the view and translation invariance, and the visual input contains massive irrelevant information for decision making, resulting in predominant pre-training approaches from general vision less suitable for the autonomous driving task. To this end, we propose PPGeo (Policy Pre-training via Geometric modeling), an intuitive and straightforward fully self-supervised framework curated for the policy pre-training in visuomotor driving. We aim at learning policy representations as a powerful abstraction by modeling 3D geometric scenes on large-scale unlabeled and uncalibrated YouTube driving videos. The proposed PPGeo is performed in two stages to support effective self-supervised training. In the first stage, the geometric modeling framework generates pose and depth predictions simultaneously, with two consecutive frames as input. In the second stage, the visual encoder learns driving policy representation by predicting the future ego-motion and optimizing with the photometric error based on current visual observation only. As such, the pre-trained visual encoder is equipped with rich driving policy related representations and thereby competent for multiple visuomotor driving tasks. As a side product, the pre-trained geometric modeling networks could bring further improvement to the depth and odometry estimation tasks. Extensive experiments covering a wide span of challenging scenarios have demonstrated the superiority of our proposed approach, where improvements range from 2% to even over 100% with very limited data.